Links¶
See also
Link definition¶
Links are defined using:
- Joint names (see Joints and Masses section to visualize them) and,
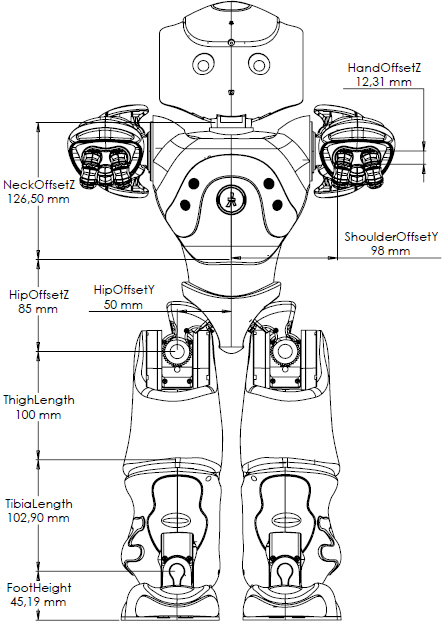
- a point called Torso, located at - 126.50 Z (mm) from HeadYaw.
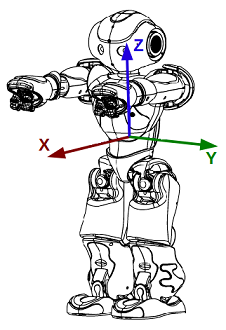
Axis definition
The X axis is positive toward NAO’s front, the Y from right to left and the Z is vertical.
Head¶
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | HeadYaw | 0.00 | 0.00 | 126.50 |
| HeadYaw | HeadPitch | 0.00 | 0.00 | 0.00 |
| Main length (mm) | |
|---|---|
| NeckOffsetZ | 126.50 |
Arms¶
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | LShoulderPitch | 0.00 | 98.00 | 100.00 |
| LShoulderPitch | LShoulderRoll | 0.00 | 0.00 | 0.00 |
| LShoulderRoll | LElbowYaw | 105.00 | 15.00 | 0.00 |
| LElbowYaw | LElbowRoll | 0.00 | 0.00 | 0.00 |
| LElbowRoll | LWristYaw | 55.95 | 0.00 | 0.00 |
| Main length (mm) | |
|---|---|
| ShoulderOffsetY | 98.00 |
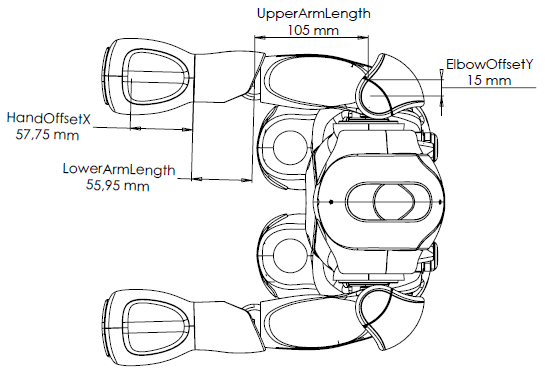
| ElbowOffsetY | 15.00 |
| UpperArmLength | 105.00 |
| LowerArmLength | 55.95 |
| ShoulderOffsetZ | 100.00 |
| HandOffsetX | 57.75 |
| HandOffsetZ | 12.31 |
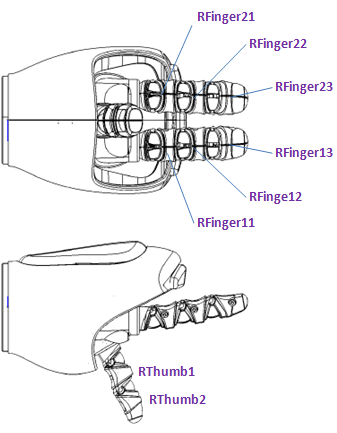
Fingers¶
Left
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
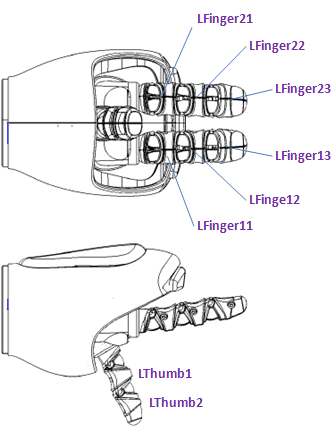
| LWristYaw | LFinger11 | 69.07 | 11.57 | -3.04 |
| LFinger11 | LFinger12 | 14.36 | 0.00 | 0.00 |
| LFinger12 | LFinger13 | 14.36 | 0.00 | 0.00 |
| LWristYaw | LFinger21 | 69.07 | -11.57 | -3.04 |
| LFinger21 | LFinger22 | 14.36 | 0.00 | 0.00 |
| LFinger22 | LFinger23 | 14.36 | 0.00 | 0.00 |
| LWristYaw | LThumb1 | 48.95 | 0.00 | -26.38 |
| LThumb1 | LThumb2 | 14.36 | 0.00 | 0.00 |
Right
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| RWristYaw | RFinger11 | 69.07 | 11.57 | -3.04 |
| RFinger11 | RFinger12 | 14.36 | 0.00 | 0.00 |
| RFinger12 | RFinger13 | 14.36 | 0.00 | 0.00 |
| RWristYaw | RFinger21 | 69.07 | -11.57 | -3.04 |
| RFinger21 | RFinger22 | 14.36 | 0.00 | 0.00 |
| RFinger22 | RFinger23 | 14.36 | 0.00 | 0.00 |
| RWristYaw | RThumb1 | 48.95 | 0.00 | -26.38 |
| RThumb1 | RThumb2 | 14.36 | 0.00 | 0.00 |
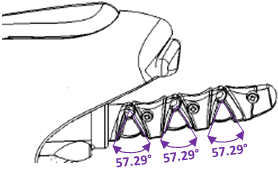
Angles
Angle between two phalanges: 57.29 degrees
Left
“LFinger11”: RotX(10.0)
“LFinger21”: RotX(-10.0)
“LThumb1”: RotX(180.0)*RotY(-60.0)
Right
“RFinger11”: RotX(10.0)
“RFinger21”: RotX(-10.0)
“RThumb1”: RotX(180.0)*RotY(-60.0)
Legs¶
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | LHipYawPitch | 0.00 | 50.00 | -85.00 |
| LHipYawPitch | LHipRoll | 0.00 | 0.00 | 0.00 |
| LHipRoll | LHipPitch | 0.00 | 0.00 | 0.00 |
| LHipPitch | LKneePitch | 0.00 | 0.00 | -100.00 |
| LKneePitch | LAnklePitch | 0.00 | 0.00 | -102.90 |
| LAnklePitch | LAnkleRoll | 0.00 | 0.00 | 0.00 |
| Main length (mm) | |
|---|---|
| HipOffsetZ | 85.00 |
| HipOffsetY | 50.00 |
| ThighLength | 100.00 |
| TibiaLength | 102.90 |
| FootHeight | 45.19 |