Pepper - Sonars¶
See also
Specification¶
The robot is equipped with two ultrasonic sensors (or sonars) which allow it to estimate the distance to obstacles in its environment.
Sonar: 2 actuators, 2 sensors.
| Frequency | 42kHz |
| Sensitivity | -86dB |
| Resolution | 0.03 m |
| Detection range | 0,15 m - 6,45 m Operational on 0.15 m - 2.5 m |
| Effective cone | 60° |
Location¶
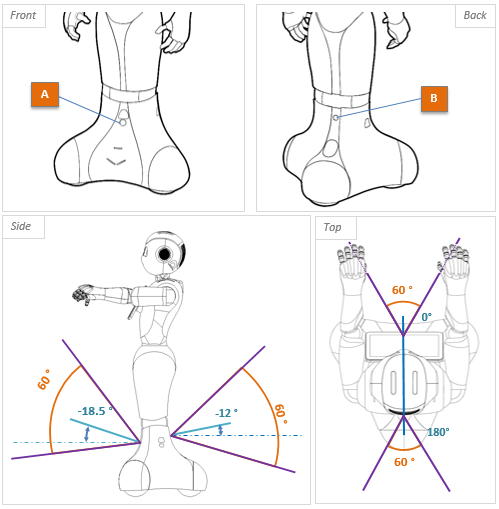
Position relative to KneePitch.
| Part | Location | Name | X(m) | Y(m) | Z(m) | WX(deg) | WY(deg) | WZ(deg) | VFOV | HFOV |
|---|---|---|---|---|---|---|---|---|---|---|
| A | Front | SonarF | 0.06990 | 0.00000 | -0.10230 | 0.00000 | -18.49840 | 0.00000 | 60 ° | 60 ° |
| B | Back | SonarB | -0,07180 | 0.00000 | -0,05340 | -0.00000 | -12.00000 | 180.00000 |
To access values by using ALMemory key names, see: Sonars.