Pepper - Construction¶
See also
Dimensions¶
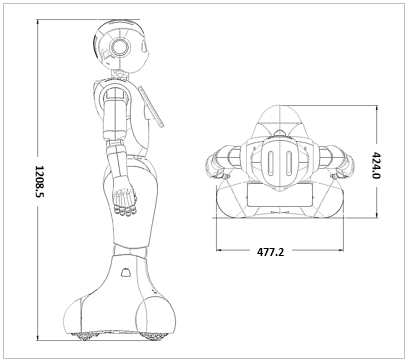
Arm down
| Height (mm) | Width (mm) | Depth (mm) |
|---|---|---|
| 1208.5 | 477.2 | 424 |
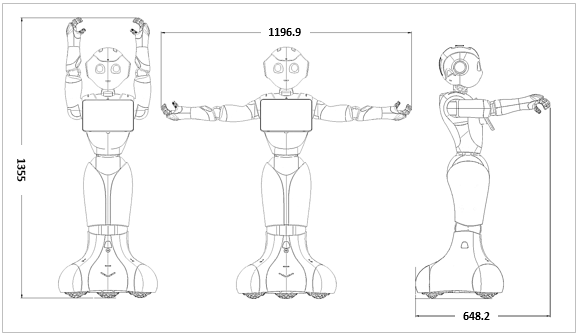
Max with arms spread out
| Height (mm) - arm up | Width (mm) - arm on side | Depth (mm) - arm in front |
|---|---|---|
| 1355 | 1196.9 | 648.2 |
Weight¶
Weight: 27.82 Kg
Material¶
| Shell | painted PC/ABS |
| Structural parts | PA 66 GF30 |
| Soft parts | TPV (vulcanized thermoplastic elastomer) |