Pepper - Links¶
See also
Length overview¶
Link definition¶
Links are defined using:
- Joint names and,
- a point called Torso, located at -38.00 X (mm) and 169.90 Z (mm) from HeadYaw.
See Pepper - Masses to visualize them.
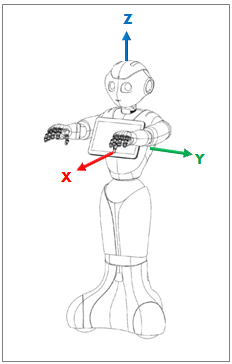
Axis definition
The X axis is positive toward robot’s front, the Y from right to left and the Z is vertical.
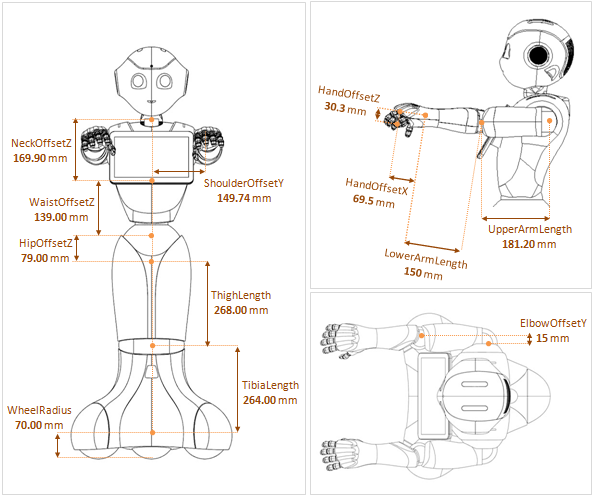
Head¶
- NeckOffsetZ
- 169.90
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | HeadYaw | -38.00 | 0.00 | 169.90 |
| HeadYaw | HeadPitch | 0.00 | 0.00 | 0.00 |
Arms¶
- ShoulderOffsetY
- 149.74
- ElbowOffsetY
- 15.00
- UpperArmLength
- 181.20
- LowerArmLength
- 150.0
- ShoulderOffsetZ
- 86.82
- HandOffsetX
- 69.5
- HandOffsetZ
- 30.3
Left
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | LShoulderPitch | -57.00 | 149.74 | 86.82 |
| LShoulderPitch | LShoulderRoll | 0.00 | 0.00 | 0.00 |
| LShoulderRoll | LElbowYaw | 181.20 | 15.00 | 0.13 |
| LElbowYaw | LElbowRoll | 0.00 | 0.00 | 0.00 |
| LElbowRoll | LWristYaw | 150.00 | 23.60 | 22.84 |
| LWristYaw | LHandCenter | 69.5 | 0.00 | -30.30 |
Right
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | RShoulderPitch | -57.00 | -149.74 | 86.82 |
| RShoulderPitch | RShoulderRoll | 0.00 | 0.00 | 0.00 |
| RShoulderRoll | RElbowYaw | 181.20 | -15.00 | 0.13 |
| RElbowYaw | RElbowRoll | 0.00 | 0.00 | 0.00 |
| RElbowRoll | RWristYaw | 150.00 | 23.60 | 22.84 |
| RWristYaw | RHandCenter | 69.5 | 0.00 | -30.30 |
Fingers¶
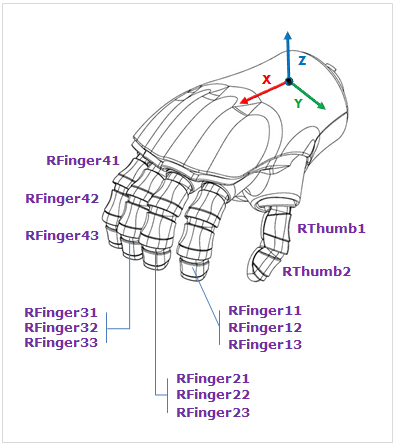
Left
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| LWristYaw | LFinger11 | 72.10 | -26.80 | 4.00 |
| LFinger11 | LFinger12 | 18.00 | 0.00 | 0.00 |
| LFinger12 | LFinger13 | 18.00 | 0.00 | 0.00 |
| LWristYaw | LFinger21 | 77.30 | -7.30 | 6.00 |
| LFinger21 | LFinger22 | 18.00 | 0.00 | 0.00 |
| LFinger22 | LFinger23 | 18.00 | 0.00 | 0.00 |
| LWristYaw | LFinger31 | 73.30 | 12.30 | 4.00 |
| LFinger31 | LFinger32 | 18.00 | 0.00 | 0.00 |
| LFinger32 | LFinger33 | 18.00 | 0.00 | 0.00 |
| LWristYaw | LFinger41 | 64.00 | 30.90 | 0.00 |
| LFinger41 | LFinger42 | 18.00 | 0.00 | 0.00 |
| LFinger42 | LFinger43 | 18.00 | 0.00 | 0.00 |
| LWristYaw | LThumb1 | 38.20 | -35.70 | -19.90 |
| LThumb1 | LThumb2 | 22.00 | 0.00 | 0.00 |
Right
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| RWristYaw | RFinger11 | 72.10 | 26.80 | 4.00 |
| RFinger11 | RFinger12 | 18.00 | 0.00 | 0.00 |
| RFinger12 | RFinger13 | 18.00 | 0.00 | 0.00 |
| RWristYaw | RFinger21 | 77.30 | 7.30 | 6.00 |
| RFinger21 | RFinger22 | 18.00 | 0.00 | 0.00 |
| RFinger22 | RFinger23 | 18.00 | 0.00 | 0.00 |
| RWristYaw | RFinger31 | 73.30 | -12.30 | 4.00 |
| RFinger31 | RFinger32 | 18.00 | 0.00 | 0.00 |
| RFinger32 | RFinger33 | 18.00 | 0.00 | 0.00 |
| RWristYaw | RFinger41 | 64.00 | -30.90 | 0.00 |
| RFinger41 | RFinger42 | 18.00 | 0.00 | 0.00 |
| RFinger42 | RFinger43 | 18.00 | 0.00 | 0.00 |
| RWristYaw | RThumb1 | 38.20 | 35.70 | -19.90 |
| RThumb1 | RThumb2 | 22.00 | 0.00 | 0.00 |
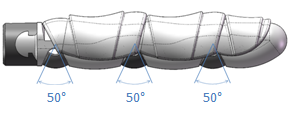
Angle between two phalanges: 50 degrees.
Left
“LFinger11”: RotZ(-10.5)*RotX(5.0)
“LFinger21”: RotZ(-3.5)*RotX(0.0)
“LFinger31”: RotZ(3.5)*RotX(-3.0)
“LFinger41”: RotZ(12.5)*RotX(-5.0)
“LThumb1”: RotX(180.0)*RotZ(67.4)*RotY(-70.7)*RotX(-110.0)
Right
“RFinger11”: RotZ(10.5)*RotX(-5.0)
“RFinger21”: RotZ(3.5)*RotX(0.0)
“RFinger31”: RotZ(-3.5)*RotX(3.0)
“RFinger41”: RotZ(-12.5)*RotX(5.0)
“RThumb1”: RotX(180.0)*RotZ(-67.4)*RotY(-70.7)*RotX(110.0)
Leg¶
- WaistOffsetZ
- 139.00 mm
- HipOffsetZ
- 79.00 mm
- ThighLength
- 268.00 mm
- TibiaLength
- 264.00 mm
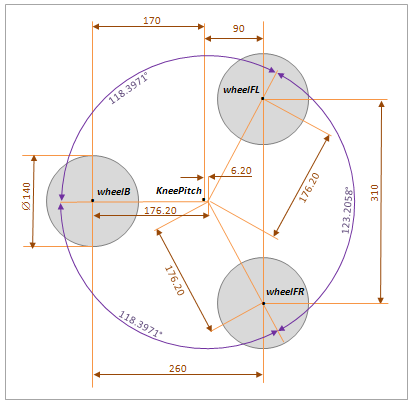
- WheelRadius
- 70 mm
- WheelCenterOffset
- 6.20 mm
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | HipRoll | 0.02 | 0.00 | -139.00 |
| HipRoll | HipPitch | 0.00 | 0.00 | -79.00 |
| HipPitch | KneePitch | 0.00 | 0.00 | -268.00 |
| KneePitch | WheelFL | 90.00 | 155.79 | -264.00 |
| KneePitch | WheelFR | 90.00 | -155.79 | -264.00 |
| KneePitch | WheelB | -170.00 | 0.00 | -264.00 |