Robot view¶
What is the Robot view¶
- the Motion widget or
- the Forward kinematics mode - Experimental.
It is updated as soon as you move a joint:
- playing a Behavior,
- moving a joint manually (on a real robot) or
- moving a joint using the Motion widget or the Forward kinematics mode - Experimental.
Limitations: The torso of the robot is static. It is the reference of this 3D view. The limbs and the head of the robot moves around the torso which does not move. So even if your real robot falls over, you will not see it lied down in the 3D view. You will only see the relative position of its joints.
Options¶
Selecting a different simulated robot¶
If you are connected to a Simulated robot, you can change the model and the hardware version of the robot:
Deactivate 3D view¶
In case of technical issue with your computer, disturbing the display, you can deactivate the 3D view:
- Choose Edit > Preferences.
- Choose the Start Choregraphe without the 3D option.
This option replaces the dynamic view by a static one.
For further details, see Choregraphe Preferences.
Activate Forward kinematics mode¶
You can opt for another way of moving joints, the Forward kinematics mode - Experimental:
- Choose Edit > Preferences.
- Make sure the Start Choregraphe without the 3D option is deactivated.
- Choose the Use 3D controller for motors (Experimental) option.
For further details, see Choregraphe Preferences.
Forward kinematics mode - Experimental¶
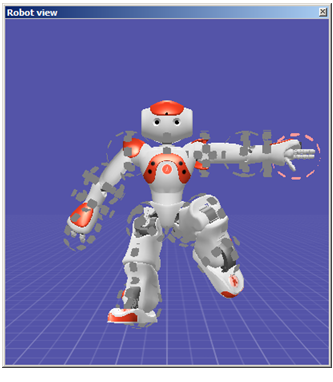
When activated, this mode allows you to directly move the joints in the Robot view.
Each joint can be moved by dragging one of the wheels appearing round the joints.