T2 - Joints¶
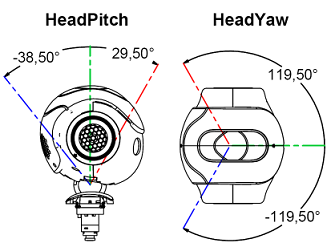
Head joints¶
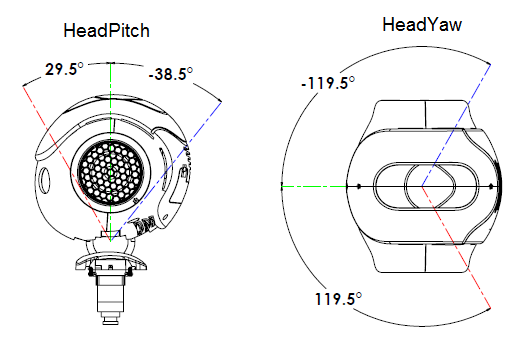
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| HeadYaw | Head joint twist (Z) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| HeadPitch | Head joint front and back (Y) | -38.5 to 29.5 | -0.6720 to 0.5149 |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/HeadPitch/Position/Actuator/Value
Device/SubDeviceList/HeadYaw/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/HeadPitch/Position/Sensor/Value
Device/SubDeviceList/HeadYaw/Position/Sensor/Value
Due to collision with NAO shell, the head yaw and pitch are limited.
| HeadYaw (°) | HeadPitch - (°) | HeadPitch + (°) |
|---|---|---|
| -119.52 | -25.73 | 18.91 |
| -87.49 | -18.91 | 11.46 |
| -62.45 | -24.64 | 17.19 |
| -51.74 | -27.50 | 18.91 |
| -43.32 | -31.40 | 21.20 |
| -27.85 | -38.50 | 24.18 |
| 0.0 | -38.50 | 29.51 |
| 27.85 | -38.50 | 24.18 |
| 43.32 | -31.40 | 21.20 |
| 51.74 | -27.50 | 18.91 |
| 62.45 | -24.64 | 17.19 |
| 87.49 | -18.91 | 11.46 |
| 119.52 | -25.73 | 18.91 |
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| HeadYaw | Head joint twist (Z) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| HeadPitch | Head joint front and back (Y) | -38.5 to 29.5 | -0.6720 to 0.5149 |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/HeadPitch/Position/Actuator/Value
Device/SubDeviceList/HeadYaw/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/HeadPitch/Position/Sensor/Value
Device/SubDeviceList/HeadYaw/Position/Sensor/Value
Due to collision with NAO shell, the head yaw and pitch are limited.
| HeadYaw (°) | HeadPitch - (°) | HeadPitch + (°) |
|---|---|---|
| -119.52 | -25.73 | 18.91 |
| -87.49 | -18.91 | 11.46 |
| -62.45 | -24.64 | 17.19 |
| -51.74 | -27.50 | 18.91 |
| -43.32 | -31.40 | 21.20 |
| -27.85 | -38.50 | 24.18 |
| 0.0 | -38.50 | 29.51 |
| 27.85 | -38.50 | 24.18 |
| 43.32 | -31.40 | 21.20 |
| 51.74 | -27.50 | 18.91 |
| 62.45 | -24.64 | 17.19 |
| 87.49 | -18.91 | 11.46 |
| 119.52 | -25.73 | 18.91 |
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| HeadYaw | Head joint twist (Z) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| HeadPitch | Head joint front and back (Y) | -38.5 to 29.5 | -0.6720 to 0.5149 |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/HeadPitch/Position/Actuator/Value
Device/SubDeviceList/HeadYaw/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/HeadPitch/Position/Sensor/Value
Device/SubDeviceList/HeadYaw/Position/Sensor/Value
Due to collision with NAO shell, the head yaw and pitch are limited.
| HeadYaw (°) | HeadPitch - (°) | HeadPitch + (°) |
|---|---|---|
| -119.52 | -25.73 | 18.91 |
| -87.49 | -18.91 | 11.46 |
| -62.45 | -24.64 | 17.19 |
| -51.74 | -27.50 | 18.91 |
| -43.32 | -31.40 | 21.20 |
| -27.85 | -38.50 | 24.18 |
| 0.0 | -38.50 | 29.51 |
| 27.85 | -38.50 | 24.18 |
| 43.32 | -31.40 | 21.20 |
| 51.74 | -27.50 | 18.91 |
| 62.45 | -24.64 | 17.19 |
| 87.49 | -18.91 | 11.46 |
| 119.52 | -25.73 | 18.91 |