T14 - Masses¶
Legend¶
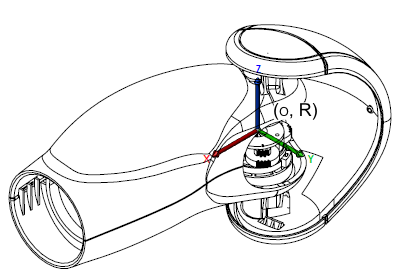
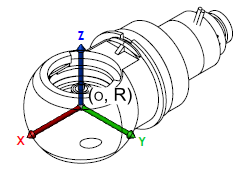
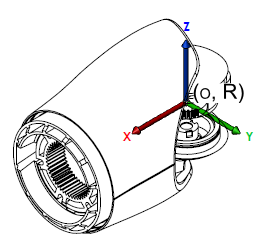
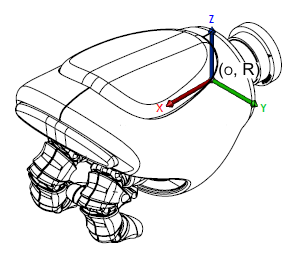
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/c10f44e2029ff9389e41eed6a5f380c4ba542843.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/00ce03166e8c671b404f890782379858e282c886.png)
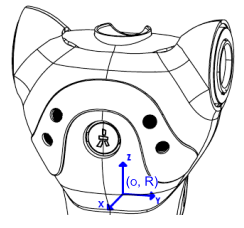
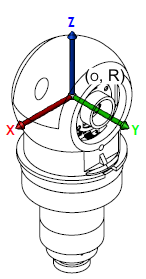
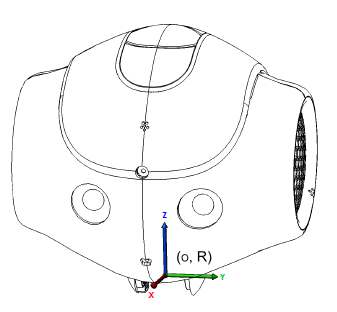
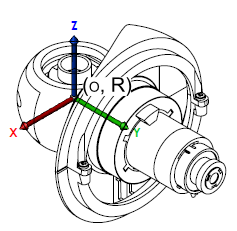
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: with straight arms pointing forwards.
Whole robot¶


![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00544 \\
0.00005 \\
-0.01049
\end{array}
\right]_{(o, R)}](../../_images/math/71f05853abf7486058ad8b5482ff05100a63251d.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00407798983 & 0.00001905036 & -0.00009699419 \\
0.00001905036 & 0.00383666587 & -0.00000729520 \\
-0.00009699419 & -0.00000729520 & 0.00191346075 \\
\end{array}
\right]_R](../../_images/math/41a0ae19609665a785b43ad95709738f1d731b27.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00001 \\
0.00014 \\
-0.02742
\end{array}
\right]_{(o, R)}](../../_images/math/14280028ca21c76734f9c8f849f2bb1ca0896955.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007499295 & +0.00000000157 & -0.00000001834 \\
+0.00000000157 & +0.00007599995 & -0.00000005295 \\
-0.00000001834 & -0.00000005295 & +0.00000553373 \\
\end{array}
\right]_R](../../_images/math/a0b1fedbd279237f53a6b06925260bb363dc378d.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00112 \\
0.00003 \\
0.05258
\end{array}
\right]_{(o, R)}](../../_images/math/740e5a537a6af045a9780972eaca0f23c94bca31.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00263129518 & +0.00000878814 & +0.00004098466 \\
+0.00000878814 & +0.00249112488 & -0.00002995792 \\
+0.00004098466 & -0.00002995792 & +0.00098573565 \\
\end{array}
\right]_R](../../_images/math/41d65c66f1b8664e254bc2152d3d2f292456c589.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00165 \\
+0.02663 \\
+0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/3dd270ed3a5bb168db3cf53efc7fc3aa98625859.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008428430 & +0.00000202802 & +0.00000002338 \\
+0.00000202802 & +0.00001415561 & +0.00000001972 \\
+0.00000002338 & +0.00000001972 & +0.00008641949 \\
\end{array}
\right]_R](../../_images/math/4263453b39c4eea3dc264acdbf04116fda2200b5.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00165 \\
-0.02663 \\
0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/a7dec484d62709df37ff51f402490137e1de7987.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008428430 & -0.00000202802 & +0.00000002338 \\
-0.00000202802 & +0.00001415561 & -0.00000001972 \\
+0.00000002338 & -0.00000001972 & +0.00008641949 \\
\end{array}
\right]_R](../../_images/math/a7f0fc6029a2841bf780da0f6246932cf2726e46.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02429 \\
-0.00952 \\
0.00320
\end{array}
\right]_{(o, R)}](../../_images/math/2d691dbdca36be598e28617850d8ed461239df1b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00011012031 & +0.00007669131 & -0.00002604607 \\
+0.00007669131 & +0.00036757653 & +0.00001209828 \\
-0.00002604607 & +0.00001209828 & +0.00035461772 \\
\end{array}
\right]_R](../../_images/math/de580f080fd7c15a24b2bafb656ce087899b04c5.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02455 \\
0.00563 \\
0.00330
\end{array}
\right]_{(o, R)}](../../_images/math/aa983460ab137ea43dd3b85b90a4fdb85ae5c67b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00009389993 & -0.00004714452 & -0.00002699471 \\
-0.00004714452 & +0.00037151879 & -0.00000245977 \\
-0.00002699471 & -0.00000245977 & +0.00034190083 \\
\end{array}
\right]_R](../../_images/math/d41d6898fcba267872d6506655c03f4f5d895e3f.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02744 \\
0.00000 \\
-0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/f8f242da6867c2470a132c50314b41df29011daf.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00000559715 & +0.00000000421 & +0.00000004319 \\
+0.00000000421 & +0.00007543312 & -0.00000000184 \\
+0.00000004319 & -0.00000000184 & +0.00007644339 \\
\end{array}
\right]_R](../../_images/math/01db65e07e6a9ae8d937ae8f99a777f6bffb52e4.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02552 \\
-0.00281 \\
0.00090
\end{array}
\right]_{(o, R)}](../../_images/math/37fab4aa7a1179c74e3b0acbd4d75b399ef0b1ab.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002539070 & +0.00000233243 & -0.00000060117 \\
+0.00000233243 & +0.00008922036 & +0.00000002694 \\
-0.00000060117 & +0.00000002694 & +0.00008724843 \\
\end{array}
\right]_R](../../_images/math/87e6d5784bab8527ef0b0652383158e182700b1e.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02556 \\
0.00281 \\
0.00076
\end{array}
\right]_{(o, R)}](../../_images/math/fb4371e277c6d262d3d311f71a6c12108e37d9b7.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002533220 & -0.00000234271 & +0.00000007459 \\
-0.00000234271 & +0.00008913220 & -0.00000002655 \\
+0.00000007459 & -0.00000002655 & +0.00008728726 \\
\end{array}
\right]_R](../../_images/math/9afc356e3a0191e2b4752871a2fb3400228d80b8.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.03434 \\
-0.00088 \\
0.00308
\end{array}
\right]_{(o, R)}](../../_images/math/3fa7fd9c7b435ed2814b4107cd04522e44ed0b8f.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007054933 & +0.00000571599 & -0.00002247437 \\
+0.00000571599 & +0.00035606232 & +0.00000317771 \\
-0.00002247437 & +0.00000317771 & +0.00035191933 \\
\end{array}
\right]_R](../../_images/math/997c994a9418992930d34306d241f2854991872e.png)