Legend
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.
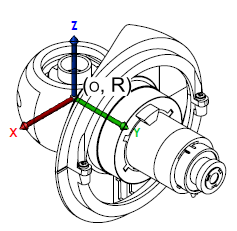
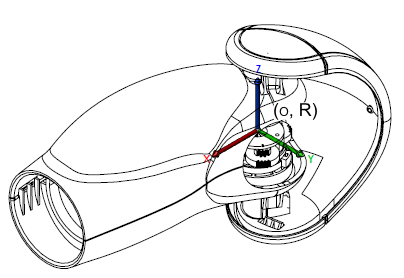
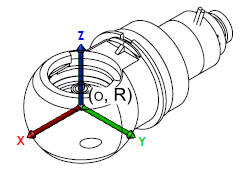
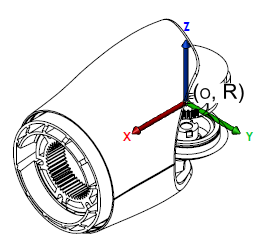
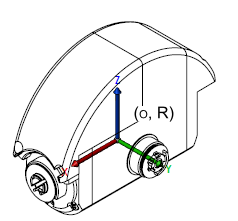
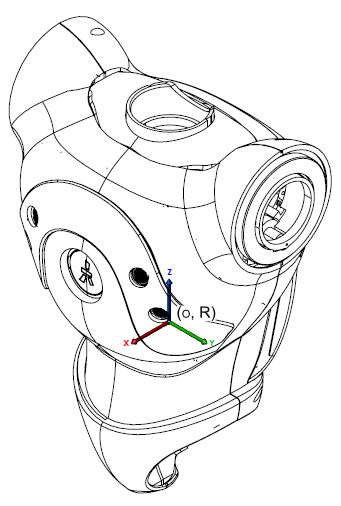
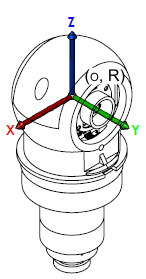
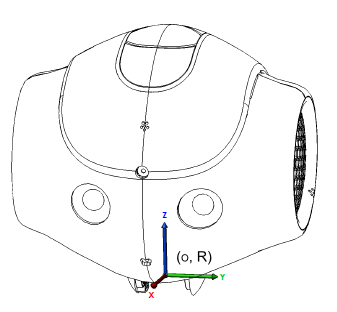
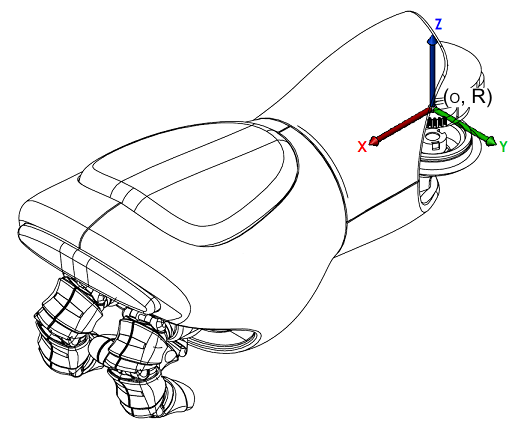
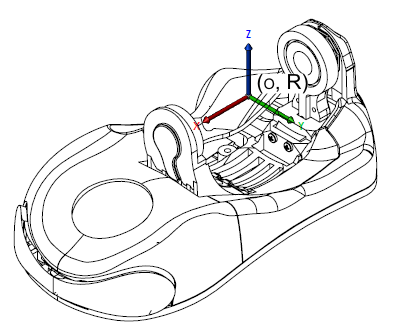
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
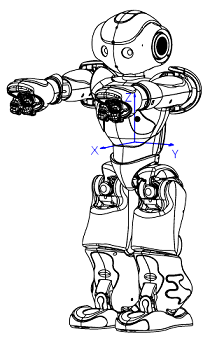
All solids (S) and local coordinate system are described relative to the zero posture: standing with straight legs and arms pointing forwards.
Arms
Right Shoulder
(o, R) is located on the joint: RShoulderPitch.
Left Shoulder
(o, R) is located on the joint: LShoulderPitch.
Right Biceps
(o, R) is located on the joint: RShoulderRoll.
Left Biceps
(o, R) is located on the joint: LShoulderRoll.
Right Elbow
(o, R) is located on the joint: RElbowYaw.
Left Elbow
(o, R) is located on the joint: LElbowYaw.
Right ForeArm
(o, R) is located on the joint: RElbowRoll.
Left ForeArm
(o, R) is located on the joint: LElbowRoll.
Legs
Right Pelvis
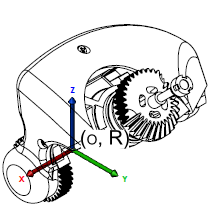
(o, R) is located on the joint: RHipYawPitch.
Left Pelvis
(o, R) is located on the joint: LHipYawPitch.
Right Hip
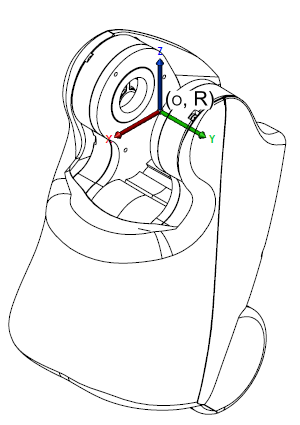
(o, R) is located on the joint: RHipRoll.
Left Hip
(o, R) is located on the joint: LHipRoll.
Right Thigh
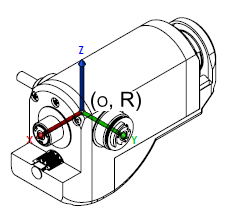
(o, R) is located on the joint: RHipPitch.
Left Thigh
(o, R) is located on the joint: LHipPitch.
Right Tibia
(o, R) is located on the joint: RKneePitch.
Left Tibia
(o, R) is located on the joint: LKneePitch.
Right Ankle
(o, R) is located on the joint: RAnklePitch.
Left Ankle
(o, R) is located on the joint: LAnklePitch.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/c10f44e2029ff9389e41eed6a5f380c4ba542843.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/00ce03166e8c671b404f890782379858e282c886.png)


![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00413\\
0\\
0.04342
\end{array}
\right]_{(o, R)}](../../_images/math/7daa664ea12de4e622169235cb2a2b31e45d87e7.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0050623407587 & 1.4311580344e-05 & 0.00015519082081\\
1.4311580344e-05 & 0.0048801358789 & -2.7079340725e-05\\
0.00015519082081 & -2.7079340725e-05 & 0.001610300038\\
\end{array}
\right]_R](../../_images/math/4d48c5f5ce8f9cb0462dec5b7a81a231b65b6d33.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-1e-05\\
0\\
-0.02742
\end{array}
\right]_{(o, R)}](../../_images/math/ad929f54681bdbfed206a71d0ad3d8846c82d805.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
7.4992953159e-05 & 1.5700000189e-09 & -1.8339999741e-08\\
1.5700000189e-09 & 7.5999952969e-05 & -5.294999994e-08\\
-1.8339999741e-08 & -5.294999994e-08 & 5.5337300182e-06\\
\end{array}
\right]_R](../../_images/math/f117ac3dc00b80a9172e7ed8181811ae1a5033c4.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00112\\
0\\
0.05258
\end{array}
\right]_{(o, R)}](../../_images/math/6b0e52510fd9b779f0256f973fee0d8ef9f85548.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0026312952396 & 8.788139894e-06 & 4.0984661609e-05\\
8.788139894e-06 & 0.0024911249056 & -2.995792056e-05\\
4.0984661609e-05 & -2.995792056e-05 & 0.00098573567811\\
\end{array}
\right]_R](../../_images/math/2831a4fbb4cb5a7449a7805a03272385f19d0f7f.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00165\\
0.02663\\
0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/650803f79e9d51fca98475871b567a23e6ca4df0.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
8.4284300101e-05 & 2.0280199351e-06 & 2.3380000158e-08\\
2.0280199351e-06 & 1.4155610188e-05 & 1.9719999855e-08\\
2.3380000158e-08 & 1.9719999855e-08 & 8.6419488071e-05\\
\end{array}
\right]_R](../../_images/math/5dd3d08ec4aec1d75168f53c473f22d7efb521d6.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00165\\
-0.02663\\
0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/f2b731997262e7addba9f27f955302d375695e34.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
8.4284300101e-05 & -2.0280199351e-06 & 2.3380000158e-08\\
-2.0280199351e-06 & 1.4155610188e-05 & -1.9719999855e-08\\
2.3380000158e-08 & -1.9719999855e-08 & 8.6419488071e-05\\
\end{array}
\right]_R](../../_images/math/9c91bc66c4260883c65541c056391ea3ba186ae9.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02455\\
-0.00563\\
0.0033
\end{array}
\right]_{(o, R)}](../../_images/math/693cb69d7debaca90acb81cbb3f492e7aac66025.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00011012030882 & 7.6691307186e-05 & -2.6046069252e-05\\
7.6691307186e-05 & 0.00036757651833 & 1.2098280422e-05\\
-2.6046069252e-05 & 1.2098280422e-05 & 0.00035461771768\\
\end{array}
\right]_R](../../_images/math/023c75b4a284350fec4533ad0d54757e6ed9f745.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.02455\\
0.00563\\
0.0033
\end{array}
\right]_{(o, R)}](../../_images/math/af8287cada06b13b85da07fb3c8ab6e9b96c19b9.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
9.3899929198e-05 & -4.7144520067e-05 & -2.6994710424e-05\\
-4.7144520067e-05 & 0.00037151877768 & -2.4597700303e-06\\
-2.6994710424e-05 & -2.4597700303e-06 & 0.00034190082806\\
\end{array}
\right]_R](../../_images/math/34dfa5cbcc61fb6084f92330871e68fcabdb2839.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02744\\
0\\
-0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/e9a1aadc98a0e26ee7fd5818db80235e14eaa0dd.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
5.5971499933e-06 & 4.2099999042e-09 & 4.3189999133e-08\\
4.2099999042e-09 & 7.5433119491e-05 & -1.8400000412e-09\\
4.3189999133e-08 & -1.8400000412e-09 & 7.6443393482e-05\\
\end{array}
\right]_R](../../_images/math/259399a997d3f16a6a2ad00627cdb1cd4859d54e.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02556\\
-0.00281\\
0.00076
\end{array}
\right]_{(o, R)}](../../_images/math/6d987f0f5f99e00013d9affc1ffb5046bb0f0a96.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
2.5390700102e-05 & 2.3324300855e-06 & -6.0116997247e-07\\
2.3324300855e-06 & 8.9220360678e-05 & 2.6940000453e-08\\
-6.0116997247e-07 & 2.6940000453e-08 & 8.7248430646e-05\\
\end{array}
\right]_R](../../_images/math/ed4178e18a1eaaf1ff44ea389c2da5181af85879.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.02556\\
0.00281\\
0.00076
\end{array}
\right]_{(o, R)}](../../_images/math/2435b5aba65cd6189a44dfb8250427d53cfde55b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
2.5332199584e-05 & -2.3427101041e-06 & 7.4589998178e-08\\
-2.3427101041e-06 & 8.91321979e-05 & -2.6549999532e-08\\
7.4589998178e-08 & -2.6549999532e-08 & 8.7287262431e-05\\
\end{array}
\right]_R](../../_images/math/ae2c24430ef9471356fba5e1fde9a61c0a34382b.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.06530 \\
-0.00114 \\
0.00051
\end{array}
\right]_{(o, R)}](../../_images/math/d9a5d8380b29e279904157d1bd55e532833ddfdc.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007810423 & -0.00001233383 & +0.00000744169 \\
-0.00001233383 & +0.00112084378 & -0.00000054551 \\
+0.00000744169 & -0.00000054551 & +0.00112214306 \\
\end{array}
\right]_R](../../_images/math/54c8c53ea30dfacb84d818f4c0e198c435dac690.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.06530 \\
0.00114 \\
0.00051
\end{array}
\right]_{(o, R)}](../../_images/math/864f99359d7cedbdbdc90ef7b09afb3121e1151b.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00781\\
0.01114\\
0.02661
\end{array}
\right]_{(o, R)}](../../_images/math/6fae7d34e1f1e9808b6a41de3640860ec171b2f4.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
8.9971952548e-05 & 5.0021899369e-06 & 1.2735249584e-05\\
5.0021899369e-06 & 0.00010552610911 & -2.7700800274e-05\\
1.2735249584e-05 & -2.7700800274e-05 & 6.6887238063e-05\\
\end{array}
\right]_R](../../_images/math/8951904e5cfbf8c2ee2126d64911b3a784c5f4ad.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00781\\
-0.01114\\
0.02661
\end{array}
\right]_{(o, R)}](../../_images/math/0fe4a575da9a0e3c089f2701ebb9e3f2c8800a9c.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
8.1502330431e-05 & -4.9944901548e-06 & 1.2748169866e-05\\
-4.9944901548e-06 & 0.00010132555326 & 2.3454740585e-05\\
1.2748169866e-05 & 2.3454740585e-05 & 6.2623628764e-05\\
\end{array}
\right]_R](../../_images/math/8a8e6f68daf81f40f02548393b1e8f5dc0555114.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.01549\\
-0.00029\\
-0.00515
\end{array}
\right]_{(o, R)}](../../_images/math/b68af98c444851394920cf9d56ce7cedf2048943.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
2.7586540455e-05 & -1.91900007e-08 & -4.108219855e-06\\
-1.91900007e-08 & 9.8269956652e-05 & 2.5099999856e-09\\
-4.108219855e-06 & 2.5099999856e-09 & 8.8103319285e-05\\
\end{array}
\right]_R](../../_images/math/134e5c8df32ac1873dfccd7712d2b053a0977aa1.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.01549\\
0.00029\\
-0.00515
\end{array}
\right]_{(o, R)}](../../_images/math/84459a0ceb72958cb77c0031b0c5b447fb11799a.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
2.7583539122e-05 & -2.2329999183e-08 & -4.0816398723e-06\\
-2.2329999183e-08 & 9.8270553281e-05 & -4.1899999026e-09\\
-4.0816398723e-06 & -4.1899999026e-09 & 8.8099732238e-05\\
\end{array}
\right]_R](../../_images/math/dbe9273cf07a4d3501ff7ed1384e4c7c6310febe.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00138\\
-0.00221\\
-0.05373
\end{array}
\right]_{(o, R)}](../../_images/math/6bc68713314bab72ecb8a005c50d40211bb184be.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0016374820843 & -8.3954000729e-07 & 8.5883009888e-05\\
-8.3954000729e-07 & 0.0015922139864 & -3.9176258724e-05\\
8.5883009888e-05 & -3.9176258724e-05 & 0.00030397824594\\
\end{array}
\right]_R](../../_images/math/c842b81c0b84ace2780fa616085717942fc44a17.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.00138\\
0.00221\\
-0.05373
\end{array}
\right]_{(o, R)}](../../_images/math/5f0fd64aaa285adf04c1182ef0fa5d9441ef309a.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.001636719564 & 9.2451000455e-07 & 8.5306681285e-05\\
9.2451000455e-07 & 0.001591072767 & 3.8361598854e-05\\
8.5306681285e-05 & 3.8361598854e-05 & 0.00030374340713\\
\end{array}
\right]_R](../../_images/math/460594d961bdf8bc46516b13b8249a8a5201c418.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00453\\
-0.00225\\
-0.04936
\end{array}
\right]_{(o, R)}](../../_images/math/566d490673e6c1a41a2d671dbdfe805bc916f902.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0011828296119 & -8.96500012e-07 & 2.7996900826e-05\\
-8.96500012e-07 & 0.0011282785563 & -3.8476038753e-05\\
2.7996900826e-05 & -3.8476038753e-05 & 0.00019145276747\\
\end{array}
\right]_R](../../_images/math/e56c14386d899065992616911b6278c17d108369.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.00453\\
0.00225\\
-0.04936
\end{array}
\right]_{(o, R)}](../../_images/math/a71ff7ba7b4c8f6d3aa03de5f62beaeaeb579c01.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0011820796644 & 6.3362000446e-07 & 3.6496971006e-05\\
6.3362000446e-07 & 0.0011286522495 & 3.949522943e-05\\
3.6496971006e-05 & 3.949522943e-05 & 0.00019322744629\\
\end{array}
\right]_R](../../_images/math/cbba272b0fd99c512e9104b49eb3490941faabe0.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00045\\
-0.00029\\
0.00685
\end{array}
\right]_{(o, R)}](../../_images/math/f9ab1be961006bc4bd0daba8bfcc2e7a62e36e04.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
3.8508129364e-05 & 6.4339999994e-08 & 3.8746597966e-06\\
6.4339999994e-08 & 7.4310817581e-05 & -4.5799999349e-09\\
3.8746597966e-06 & -4.5799999349e-09 & 5.491311822e-05\\
\end{array}
\right]_R](../../_images/math/ba34f4cab5d1aa240001b533a969979e199a541c.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.00045\\
0.00029\\
0.00685
\end{array}
\right]_{(o, R)}](../../_images/math/8889354dc3933466aff23d2f6b9239929216fa14.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
3.8509781007e-05 & -2.6340000403e-08 & 3.8619400584e-06\\
-2.6340000403e-08 & 7.4265262811e-05 & 1.8339999741e-08\\
3.8619400584e-06 & 1.8339999741e-08 & 5.4865398852e-05\\
\end{array}
\right]_R](../../_images/math/343929a8b56de70882f3b71c19b939b2cca8b501.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02542\\
-0.0033\\
-0.03239
\end{array}
\right]_{(o, R)}](../../_images/math/a83cbb662d1295f0ec0ae9cb1d518b0b11bae24b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00026930202148 & 5.8750501921e-06 & 0.00013913327712\\
5.8750501921e-06 & 0.00064347387524 & -1.8849170374e-05\\
0.00013913327712 & -1.8849170374e-05 & 0.00052503478946\\
\end{array}
\right]_R](../../_images/math/fe47dff19cbf1ac16df6bce1efa781f029aa1a09.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.02542\\
0.0033\\
-0.03239
\end{array}
\right]_{(o, R)}](../../_images/math/6c5bf88ed34521eef3f4615cf0fcdaeb5d1524ca.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00026944180718 & -5.6957201195e-06 & 0.00013937948097\\
-5.6957201195e-06 & 0.00064434250817 & 1.8740920495e-05\\
0.00013937948097 & 1.8740920495e-05 & 0.00052575673908\\
\end{array}
\right]_R](../../_images/math/866cd039e7da48d023b94cbd2ef38ac05b4edb62.png)