Cartesian control Tutorial: The Hula-Hoop motion¶
NAOqi Motion - Overview | API | Tutorial
Introduction¶
This tutorial explains how to use Cartesian control API in the context of making NAO a Hula-Hoop motion (Torso control in position and in rotation).
Note
The tutorial is written in Python.
Download¶
You can download the Hula Hoop example here: motion_hulaHoop.py
Please refer to the section: Python SDK Install Guide for any troubleshooting linked to python.
Code review¶
In this section we describe each important piece of code of the example.
NAOqi tools¶
- First, we import some external library:
- config: the config file (see above the Download section)
- motion: some useful definition such as SPACE.
- almath: an optimized mathematic toolbox for robotics. For further details, see: libalmath API reference.
Then, the proxy to ALMotion module is created. This proxy is useful to call ALMotion API.
import config
import motion
import almath
def main():
'''
Example showing a Hula Hoop Motion
with the NAO cartesian control of torso
'''
motionProxy = config.loadProxy("ALMotion")
NAO initialization¶
When doing Cartesian control, it is important to be sure that NAO is in a good configuration. To
have the maximum range of control, the maximum stability and far away of singularity.
A PoseInit is a good posture before a Cartesian control
of the NAO Torso.
# Set NAO in Stiffness On
config.StiffnessOn(motionProxy)
# Send NAO to Pose Init
config.PoseInit(motionProxy)
Hula hoop motion¶
- We define the hula hoop motion with four checkPoints:
- forward / bend backward
- right / bend left
- backward / bend forward
- left / bend right
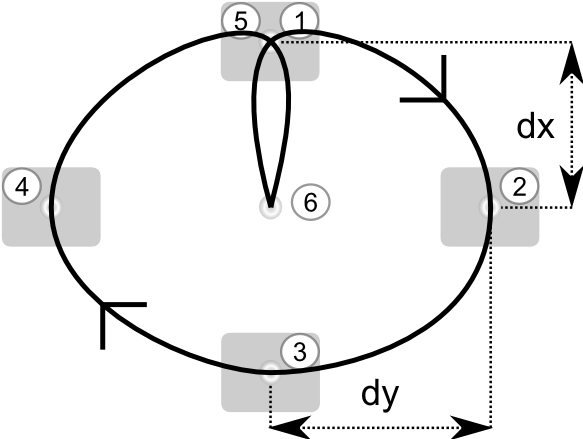
We define two loops of hula hoop. You can accelerate the motion by playing with the timeOneMove variable.
# Define the changes relative to the current position
dx = 0.07 # translation axis X (meter)
dy = 0.07 # translation axis Y (meter)
dwx = 0.15 # rotation axis X (rad)
dwy = 0.15 # rotation axis Y (rad)
# define a path of two hula hoop loops
path = [ [+dx, 0.0, 0.0, 0.0, -dwy, 0.0], # point 01 : forward / bend backward
[0.0, -dy, 0.0, -dwx, 0.0, 0.0], # point 02 : right / bend left
[-dx, 0.0, 0.0, 0.0, dwy, 0.0], # point 03 : backward / bend forward
[0.0, +dy, 0.0, dwx, 0.0, 0.0], # point 04 : left / bend right
[+dx, 0.0, 0.0, 0.0, -dwy, 0.0], # point 01 : forward / bend backward
[0.0, -dy, 0.0, -dwx, 0.0, 0.0], # point 02 : right / bend left
[-dx, 0.0, 0.0, 0.0, dwy, 0.0], # point 03 : backward / bend forward
[0.0, +dy, 0.0, dwx, 0.0, 0.0], # point 04 : left / bend right
[+dx, 0.0, 0.0, 0.0, -dwy, 0.0], # point 05 : forward / bend backward
[0.0, 0.0, 0.0, 0.0, 0.0, 0.0] ] # point 06 : Back to init pose
timeOneMove = 0.4 #seconds
times = []
for i in range(len(path)):
times.append( (i+1)*timeOneMove )
Call the Cartesian control API¶
Here, we specify that we want to control the Torso (see Effectors)
in the FRAME_ROBOT (see Spaces) and that we want to control all the motion with
a AXIS_MASK_ALL (see Axis Masks).
We also specify that the torso path is defined in relative with the initial robot position.
# call the cartesian control API
effector = "Torso"
space = motion.FRAME_ROBOT
axisMask = almath.AXIS_MASK_ALL
isAbsolute = False
motionProxy.positionInterpolation(effector, space, path,
axisMask, times, isAbsolute)