Innehållsförteckning
1 Inledning............................................................................................................................................. 5
1.1 Simulatorer.............................................................................................................................. 5
1.2 Vad är en robot?.................................................................................................................... 5
1.3 Svårigheterna med att simulera en robot......................................................... 6
1.4 Målet med Projektet........................................................................................................... 6
1.5 Några användningsområden....................................................................................... 6
1.5.1 Robotlokaliseringsproblemet............................................................................................. 6
1.5.2 Urskiljningsproblemet......................................................................................................... 7
1.5.3 Kartlägga omgivningen...................................................................................................... 7
1.5.4 Styrning.................................................................................................................................. 7
2 Khepera................................................................................................................................................ 8
2.1 Specifikationer....................................................................................................................... 8
2.2 Kommunikationsalternativ......................................................................................... 9
2.3 Kommunikationsnivå....................................................................................................... 10
2.4 Kheperans Språk.................................................................................................................. 11
3 Beskrivning av arbetet.......................................................................................................... 12
3.1 Programbeskrivning.......................................................................................................... 13
3.1.1 Geometriska klasser........................................................................................................... 13
3.1.2 Skärmobjekt......................................................................................................................... 13
3.2 Effektorer och sensorer................................................................................................ 14
3.2.1 Effektorer.............................................................................................................................. 14
3.2.2 Tvåhjulsmotor...................................................................................................................... 15
3.2.3 Lampa................................................................................................................................... 15
3.2.4 Sensorer................................................................................................................................ 15
3.2.5 Avståndssensor.................................................................................................................... 16
3.2.6 Fotosensor........................................................................................................................... 16
3.2.7 Närhetssensor...................................................................................................................... 17
3.2.8 Kompass............................................................................................................................... 18
3.2.9 GPS........................................................................................................................................ 18
3.2.10 Kartograf.............................................................................................................................. 18
4 Sammanfattning......................................................................................................................... 19
4.1 Vad som är gjort................................................................................................................. 19
4.2 Framtiden................................................................................................................................. 19
5 Referenser....................................................................................................................................... 20
Appendix A – Ordlista....................................................................................................................... 21
Appendix B – Kheperans Kommandon...................................................................................... 22
Appendix C – Klasser.......................................................................................................................... 25
Appendix D - Användarmanual.................................................................................................... 28
Figurförteckning
Figur
1: Bild av Kheperaroboten______________________________________ 8
Figur
2: Kompilerat program skickas
till Kheperan_________________________ 9
Figur
3: Styrprogram kommunicerar
med Kheperan________________________ 9
Figur
4: Styrprogram och
kommunikationsprogram laddas ner till Kheperan_____ 10
Figur
5: Skiss över
kommunikationsstruktur för simulatorprogrammet_________ 12
Figur
6: Bild av
användargränssnittet på serversidan______________________ 13
Figur
7: Principbild av
informationsflödet i en effektor_____________________ 14
Figur
8: Tvåhjulsmotorn och dess
datafält______________________________ 15
Figur
9: Skiss av en lampa och dess
datafält____________________________ 15
Figur
10: Ett sensorfält och de
parametrar som styr dess utbredning__________ 16
Figur
11: Graf över ljussensorns
mätvärden_____________________________ 17
Figur
12: Graf över Närhetssensorns
signalstyrka________________________ 17
Figur
13: Bild över hur en
kartografs värden kan representera en karta_________ 17
1 Inledning
Projektet går ut på att skapa en simulator med en sådan detaljrikedom att den skall kunna användas för att simulera riktiga robotar. Det är också meningen att man skall kunna representera många olika robotar. Varje robot skall kunna fatta beslut själv, utifrån vad den lär sig och vad den får för intryck (percepts). Fler än en robot skall kunna simuleras, och för att få datorkapaciteten att räcka så skall varje robot kunna köras på en separat dator och kommunicera med servern som berättar vad roboten ser.
Som språk valde vi Java för dess objektorienterade synsätt och dess flexibilitet. Vi behövde grafik, trådar och nätverksstöd. Allt detta finns färdigt i Java.
1.1 Simulatorer
Att uföra en simulering av ett verkligt förlopp med hjälp av en dator har varit en möjlighet sedan den första datorn skapades. Vad är det då för mening med att simulera en robot och dess omgivning? Svaret på det är att robotar är dyra och innan man kan arbeta mot en riktig robot så kan man arbeta mot en simulator. Detta gör att man kan ta in fler studenter på en kurs som handlar om robotar, robotstyrning och inlärningsalgoritmer och vid en sådan kurs kan en simulator räcka långt för att få en första förståelse av problematiken kring styrningen av en riktig robot. Vår simulator har också den fördelen att när man har utvecklat ett styrprogram för roboten i simulatorn kan man direkt styra den riktiga roboten utan extra arbete[1].
1.2 Vad är en robot?
Det som skiljer en robot från vilken annan mekanisk konstruktion som helst är dess förmåga att fatta egna beslut. Till sin hjälp har den sensorer som läser av omgivningen och effektorer som verkställer robotens beslut.
Vi har inte kommit så långt än att vi behöver ta hänsyn till de robotlagar som den skönlitteräre författaren Asimov [1] presenterat i sin litteratur.
1.
En robot får
inte skada en människa eller genom underlåtenhet skada en människa.
2.
En robot måste
lyda en människa så länge detta inte strider mot den första lagen.
3.
En robot måste
skydda sin egna existens så länge detta inte bryter mot första eller andra
lagen.
Robotars nuvarande problemställning är snarare: var är jag[2], var ska jag[3], vad ser jag[4] och hur skall jag kombinera dessa till något vettigt.
1.3 Svårigheterna med att simulera en robot
Det finns många svårigheter med att göra en robotsimulator. Varje objekt i den simulerade världen skall ha egenskaper som ett verkligt objekt har som t.ex. hastighet, riktning, materialtyp, tyngd och så vidare. Dessutom måste man simulera varje typ av sensor på roboten och konstruera artificiellt brus för dessa. Sedan måste robotens beslut kunna hanteras inte bara för en typ av robot utan för godtyckliga robotar. Detta leder till många val när det gäller vilken nivå som kommandona till roboten skall ligga på. Det gäller att göra kommunikationen generell så att det protokoll som skall användas fungerar både för en robot med två hjul och en annan robot med fyra ben.
För oss var det svårast att hantera kollisioner för kartobjekt på ett sätt som överenstämde med verkligheten. Verkligheten kräver mycket för att simuleras men det är inte där vi har lagt arbetets tyngdpunkt, även om vi har gjort mycket för att få det rätt.
1.4 Målet med Projektet
Målet är att skapa en simulator som kan användas i utvecklingen av inlärningsalgoritmer och styrprogram för riktiga robotar och som sedan kan kopplas upp direkt mot den riktiga roboten. Vi har gjort en del val för hur vi representerar världen i simulationen. Vi har en platt kvadratisk värld med en sida på 4m. Underlaget är jämt och vi har inget väder eller andra yttre faktorer som kan inverka på simulationen. Alla objekt representeras av tvådimensionella polygoner som kallas kartobjekt. Allting presenteras sett uppifrån med ett grafiskt gränssnitt.
1.5 Några användningsområden
Simulatorn kan användas för att simulera olika styrproblem för robotar men framför allt kan man simulera olika inlärningsalgoritmer. Det går utmärkt att använda simulatorn för att se hur flera robotar interagerar med varandra eller med sin omgivning. Här nedan tar jag upp några av de problem som man kan använda simulatorn till och problem som man bör ta upp inledningsvis för att lära sig hantera simulatorn.
1.5.1 Robotlokaliseringsproblemet
Ett väldigt känt problem är robotlokaliseringsproblemet som helt enkelt är att veta var roboten är. Problemet är att man kan lätt få ett allt större fel om man använder passiv referens[5] (dead reconing) speciellt om roboten kör in i något och bara står och slirar.
1.5.2 Urskiljningsproblemet
Ett annat problem är att skilja på olika objekt. Först att se om någonting är ett rörligt objekt och sedan se skillnad på om det t.ex. är en boll eller en annan robot. Detta problem är av stor vikt om man skall simulera t.ex en robocup[4]. Man brukar fuska och ha bollen i en annan färg (givet att robotarna kan urskilja färger) eller göra bollen självlysande eller på något annat sätt särskilja bollen från alla andra objekt i omgivningen.
1.5.3 Kartlägga omgivningen
Att försöka kartlägga omgivningen är inte så lätt som det verkar, särskillt om det finns rörliga objekt. Kartläggning går in under robotlokaliseringsproblemet. Här kan man beräkna sannolikheter för de olika väggbitarna, se Markovprocesser [2]. Exempel på en uppgift är att åka igenom en labyrint på så kort tid som möjligt. Här ger Kheperaroboten hjälp då man kan ange en position den skall åka till och sedan sköter Kheperan om resten.
1.5.4 Styrning
När det gäller att planera robotens färdväg finns det många svårigheter, speciellt om omgivningen innehåller andra rörliga objekt. För att planera hur roboten ska röra sig använder man sig av rörelseplanering eller Robot Motion Planning[5]. Ett exempel på hur fel det kan bli är en enkel styrregel som säger att om du får en signal från de främre närhetssensorerna (se kapitel 3.2.7) så sväng åt det håll som har svagast signal. Denna regel verkar tillsynes göra att roboten kör omkring och undviker objekt, men i ett rektangulärt rum blev tyvärr resultatet att roboten sicksackade in i ett hörn och ställde sig där och slirade.
Som ett inledande moment i en kurs kan man göra en tournering, där studenterna får skapa styrprogram för roboten. Styrprogrammet skall köra runt roboten utan att krocka och roboten skall ha en viss minimihastighet. Studenterna kan då tävla mot varandra i simulatorn, där den som krockar sist får gå vidare och möta andra vinnare.
2 Khepera


Den robot som vi har implementerat är Khepera. Det är en
miniatyrrobot som har den fördelen att den är liten, relativt billig, flyttbar
och kan utökas med många olika funktioner. Den utvecklats av Labratoire de
Microinformatique[3] i Schweiz.
Figur
1: Bild av Kheperaroboten
2.1 Specifikationer
Roboten är bara 55mm i diameter och har åtta ljussensorer som den använder dels för att se ljuskällor och dels för att se om den kommer nära andra objekt. Hastigheten på de två hjulen kan sättas individuellt vilket ger både framdrivning och styrning på samma gång. Roboten har många utbyggnadsmöjligheter och ett relativt avancerat komunikationsprotokoll. Tack vare dess storlek kan man köra omkring roboten på ett bord eller annan plan yta där man kan ställa upp sin bana.
2.2 Kommunikationsalternativ
Det finns tre sätt att programmera och styra en Kheperarobot.
Figur
2: Kompilerat program skickas till Kheperan
Det första sättet ovan är att kompilera programmet för Kheperans motorola 68030 processor och flytta det färdiga programmet till roboten och sedan låta roboten köra självständigt. Detta sätt har den nackdelen att man inte får någon feedback när roboten kör så det blir svårt att göra felsökningar.
Figur
3: Styrprogram kommunicerar med Kheperan
Det andra sättet är att skicka kommandon till Kheperan och låta programmet som skall testas vara i bordsdatorn tillsammans med eventuell felsökningsalgoritmer. De (ASCII) kommandon som skickas till Kheperan tolkas av en inbyggd kommandotolk. Detta system är det vi använder.

Det tredje sättet att kommunicera är att skapa ett eget styrprogram för Kheperan inklusive ett kommunikationsprotokoll. Ladda ner detta till Kheperan och sedan låta Kheperan köra. Felsökningsprogram och övervakningsprogram kan då köras på bordsdatorn samtidigt som Kheperan följer sitt styrprogram. Detta är en kombination av de två tidigare metoderna.
2.3 Kommunikationsnivå
Den nivå på vilket kommunikationen sker sätter gränser för flexibiliteten men samtidigt fördelas arbetsbördan olika. Man kan antingen skicka ett kommando som tolkas av respektive robot som t.ex. Sätt hastighet=2 eller skicka mer detaljerade kommandon som inte behöver tolkas av roboten.
Vägning av fördelar och
nackdelar beroende på val av kommunikationsnivå
|
Nivå |
Generella kommandon |
Detaljerade kommandon |
|
Tid |
Kan sträcka sig över längre tid |
Utförs på kortast möjliga tid |
|
Belastning |
Kräver tolkning av roboten |
Belastar nätverket |
|
Språk |
Samma kommandon för olika robotar |
Specifika kommandon för varje typ av robot |
Vi har valt att kombinera dessa tillvägagångsätt. Vi kan skicka både generella kommandon och detaljerade kommandon. Tolkningen från de generella till de detaljerade kommandona görs i den robotklass som hör till robottypen på serversidan[6]. Vissa av robotens kommandon kan vara svåra att simulera och är för tillfället inte implementerade. Några av dessa handlar om att ladda ner styrprogram till roboten och kräver att man utökar simulatorn med en förmåga att tolka alla instruktionerna till en motorola 68030 processor. Denna typ av simulerad CPU behövs dock inte för att använda simulatorn till vad den är tänkt.
Vi har valt att huvudsakligen använda oss av de kommandon som specificeras av robottypen och att endast ha med robotoberoende kommandon för att kunna göra tidiga feltester under utvecklingsarbetet. De två robotoberoende kommandona vi har gjort är [turn grader] - där grader är antalet grader som den skall svänga nästa uppdatering och [speed v] - där v är hastigheten i bildpunkter per sekund.
2.4 Kheperans Språk
Kheperan har en egen kommandotolk. Dess kommandon består av en versal bokstav följt av noll eller flera parametrar åtskiljda av kommatecken. Kheperan svara med samma bokstav i gemen form, när kommandot har tagits emot. En komplett lista av Kheperans kommandon ges i appendix B. Listan är ett utdrag från manualen till Kheperan och ges på Engelska.
3 Beskrivning av arbetet
I vår simulator presenteras världen i en grafisk miljö uppifrån. Alla objekt på skärmen är kartobjekt. Varje kartobjekt har ett utseende som beskrivs av en polygon. De har också ett material som beskriver färg och friktion mot underlaget. Alla kartobjekt kan ges en hastighet eller en rotationsvektor. Dessutom kan man placera effektorer och sensorer på ett kartobjekt, se kapitel 3.2. Varje simulerad robot startas från en robotklient och kopplas upp mot simulatorservern över det lokala nätverket. Detta gör att vi kan utnyttja flera datorer för vår simulering. Här nedan ser ni en bild på hur simulatorprogrammets olika delar fungerar.
Figur
5: Skiss över kommunikationsstruktur för simulatorprogrammet
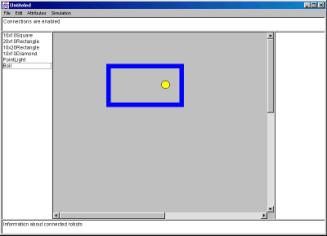
På serversidan presenteras simulationen. Här kan man ladda och spara olika banor där simuleringen sker och man kan placera ut olika kartobjekt på banan genom att dra och släppa dem där med musen. Figur fem visar en bild på hur det grafiska användargränssnittet ser ut. Man kan välja om man vill tillåta om robotar skall kunna ansluta sig eller inte och man kan markera robotar för att få reda på deras position, färg, riktning och hastighet. En mer detaljerad beskrivning av användargränssnittet och programmets användarmanual ges i appendix D.
Samma kommandon som skickas till simulatorn kan skickas till de riktiga Kheperaroboten. Nivån på kommandona, generella eller detaljerade, bestäms av robotens språk. Kheperan har till exempel ett kommando för att ange en position som den skall nå. Detta är ett generellt kommando som sträcker sig över en längre tid medan ett kommando som läser sensorvärden svarar så fort som möjligt.
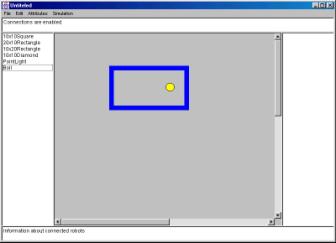
Figur
6: Bild av användargränssnittet på serversidan
3.1 Programbeskrivning
Vi behövde ett antal grundklasser för att skapa grafiska objekt. Här ges en översikt av de olika klasserna. En sammanställning av klassernas alla datafält och metoder ges i appendix C.
3.1.1 Geometriska klasser
Punkt - Punkt med reella koordinater. Den kan translateras och jämföras med andra punkter.
Linje – Ett objekt med metoder för att flytta linjer, se om två linjer korsar varandra och rotera linjer.
Poly - Ett objekt som håller ett godtyckligt antal punkter vars n första ritas ut som en polygon. Alla punkter beskrivs av reella värden. En av metoderna (”overlap”) kollar om två polygoner har ett icke tomt snitt vilket behövs för att hantera kollisioner. De punkter som finns efter de n första kan användas för att beskriva speciella fästpunkter på polygonen, se Sensorer och Effektorer.
3.1.2 Skärmobjekt
Kartobjekt – Denna klass beskriver alla saker som kan ritas ut på skärmen. Alla kartobjekt har en polygon, se Poly, som beskriver dess utsträckning. Kartobjekt har även ett material, se Material, och en rörelse, se Rörelse. Gemensamt för alla kartobjekt är att de kan ritas ut och har metoder för att göra allt det som man kan göra med polygoner, material och rörelse. Kartobjekt är det man bygger upp sin Arena med och som klassen Robot ärver från.
Rörelse – Innehåller värden för rotationshastighet och hastighet. Polygonens riktning avgör färdriktningen. Metoden update() flyttar polygonen och beräknar ny hastighet.
Material – Materialet håller egenskaper som friktion mot underlag, färg, brus, vikt och om objektet är transparent.
Robot – En robot är ett kartobjekt som har sensorer och effektorer. Roboten har alla de egenskaper som ett kartobjekt har och kan läsa av sensorer och sätta värden till sina effektorer. Klassen robot har ingen egen intelligens utan styrs från klientsidan genom att skapa en ny klass som utökar klassen Brain. Med intelligens menas här adaptiv metod för att länka sensorvärden med effektorvärden.
Arena – Beskriver alla de kartobjekt och robotar som syns på skärmen och sköter om deras uppritning och hanterar händelsehantering. Arena är en komponent i användargränssnittet där simuleringen sker.
3.2 Effektorer och sensorer
Som en genomgående strategi har vi baserat vårt projekt på idén att allt som definierar en robot kan delas upp i dels effektorer, och dels sensorer. Genom att hålla oss stringent till denna metodik har vi förenklat utvecklingen av programmet, förenklat för utbyggnad av nya robotar och framför allt gjort programmet mer generellt.
3.2.1 Effektorer
En effektor är ett verställande organ för objektet den sitter på. En effektor kan även påverka sin omgivning. Som exempel på effektor har vi motor, lampa och lysdiod. En effektor placeras på någon av ett kartobjekts fästpunkter som definieras av dess polygon[7].
En effektor kan ses som en vektor med önskade värden och en vektor med faktiska värden. När man konstruerar en effektor måste man i metoden update själv flytta de önskade värdena till de faktiska värdena för att ta hänsyn till tidsfördröjning, acceleration eller liknande tidsberoende aspekter.
Man kan utveckla många fler effektorer som; radiosändare, högtalare, griparmar eller olika framdrivningssystem.

Figur
7: Principbild av informationsflödet i en effektor
3.2.2 Tvåhjulsmotor
Tvåhjulsmotorn är en effektor som hanterar framdrivningen av objektet den sitter på. Den har sex datafält.
Datafält 0 Hastighet hjul 1 1 Hastighet hjul 2 2 Position x 3 Position y 4 Pulser hjul 1 5 Pulser hjul 2
Figur
8: Tvåhjulsmotorn och dess datafält
Tvåhjulsmotorn kan påverka två egenskaper på objektet den sitter
på. Den kan ändra objektets hastighet och dess rotation. Dessa räknas ut från
de första två datafälten d0 och d1, se nedan.
3.2.3 Lampa
Lampa är en effektor som sitter på en robot. Lampan kan ha en färg och en styrka som bestäms av lampans enda datafält. Lampans styrka beskrivs av ett värde mellan 0 och 1.
Datafält 0 Ljusstyrka Figur
9: Skiss av en lampa och dess datafält

Lampan är en enkel effektor som kan användas för att skilja vissa objekt från andra. T.ex kan man placera en lampa på en boll så underlättar man för spelarna att urskilja bollen från de andra spelarna.
3.2.4 Sensorer
En sensor är något som läser av sin omgivning och ger en vektor med reella värden som resultat varje gång den anropas. Som exempel har vi avståndssensorn och ljussensorn.
En sensor placeras på ett kartobjekt på samma sätt som en effektor. Den definieras av ett cirkelsegment updelat i ett antal sensorfält.
Vi har tänkt att man i framtiden kan tänka sig vilja ha mikrofon, radiomottagare, tryckkännare eller LRF (Laser Range Finder).
3.2.5 Avståndssensor
 Avståndssensorn, se klass DistanceSensor,
används för att bestämma avståndet till det objekt som har någon del i
sensorfältet, räknat från sensorns fästpunkt. Avståndet ges som ett tal mellan
noll och ett, där noll är nära och ett betyder att inget är i sensorns synfält.
Avståndssensorn, se klass DistanceSensor,
används för att bestämma avståndet till det objekt som har någon del i
sensorfältet, räknat från sensorns fästpunkt. Avståndet ges som ett tal mellan
noll och ett, där noll är nära och ett betyder att inget är i sensorns synfält.
Figur
10: Ett sensorfält och de parametrar som styr dess utbreding
Genom att ändra på djup, bredd, antal fält och mängden brus så kan man skapa många olika typer av avståndssensorer[8]. Bredden ges som en vinkel i radianer.
3.2.6 Fotosensor
En fotosensor känner av ljuset från lampeffektorer och beräknar sitt sensorvärde utifrån lampornas avstånd och läge i förhållande till fotosensorns riktning. Fotosensorn halverar ljusstyrkan för varje objekt som finns mellan den och lampan så länge inte objektet är transparent. Objektet som lampan sitter på skymmer inte ljuset.

Vid en första anblick kan formel ovan verka något komplicerad. Men det är en första approximering av addition av ljusstyrka, som är modifierad för att minska ljuset för de objekt som är i vägen. En mer avancerad formel behövs inte.
Detta är en av de mer krävande beräkningarna. Den är Ordo(skl), där s är antalet sensorer, k är antalet kartobjekt och l är antal lampor. Tack vare en del villkors-satser så sker bara uträkningen för de objekt som kan inverka på formeln.
Figur
11: Graf över ljussensorns mätvärden
Figur 11 beskriver hur signalstyrkan varierar från åtta ljussensorer när roboten roterar ett helt varv (22 mätpunkter) ca. 150 bildpunkter från en lampa (dvs 6dm i verkligheten). Man ser helt klart att kurvorna överrensstämmer med en normalfördelning.
3.2.7 Närhetssensor
På kheperan sitter åtta närhetssensorer. De fungerar genom att mäta ljusmängden med och utan indirekt belysning. Skillnaden mellan de två mätningarna ger mängden reflekterat ljus. Denna typ av sensor reagerar på ett avstånd mellan en till sex cetimeter beroende på färg och yta på materialet. Vi har implementerat närhetssensorn genom att hitta det närmaste kartobjektet och sedan beroende på totala färgmänden och avståndet returnera ett värde som motsvarar mängden reflekterat ljus. Det innebär att vi förenklat beräkningarna från att summera ljusreflektionen från alla objekt till att göra en approximation av mängden reflekterat ljus från det närmaste objektet.
Figur 12 beskriver hur signalstyrkan varierar med avståndet och färgmängden hos det reflekterande objektet. Färgen påverkar avståndet där signalstyrkan börjar öka. Avståndet varierar med ca fem cm, från ett helt svart till ett helt vitt objekt.
Figur
12: Närhetssensorns signalstyrka
3.2.8 Kompass
Denna sensor returnerar den riktning som objektet den sitter på har. Riktningen som returneras är helt oberoende av kompassens placering på objektet. Riktningen ges i radianer och varierar med ett brus på 0.01 radianer. Denna sensor är avsedd att placeras på en robot för nybörjare då det är en relativt svår uppgift att beräkna robotens riktning utifrån dess rörelser.
3.2.9 GPS
Denna sensor returnerar den position som centrumet på objektet den sitter på har. Positionen ges i bildpunkter och varierar med ett brus på en halv bildpunkt d.v.s. 2mm. Varje avläsning returnerar en x-koordinat och en y-koordinat. Sensorn är för närvarande inte placerad på någon robot men är avsedd en robot för nybörjare då positionering är ett komplex uppgift.
3.2.10 Kartograf
Nr 0-9 . . . . . 90-99
Denna sensor är fortfarande på
experimentstadiet. Den returnerar en punktmatris n x n stor. Varje ruta täcker
en lika stor del av världen sedd ovanifrån. Varje ruta har ett värde från 0
till 1 beroende på hur många objekt (hörnpunkter) som finns i rutan.
Standardinställningen är en 10x10 matris men högre upplösning är möjlig. Användningen
för denna sensor är att kunna få en absolut referens för hur värden ser ut.
Denna typ av sensor kan ses som en signal från en stationär kamera i taket.
Figur
13: Bild av hur en kartografs värden kan representera en karta

4 Sammanfattning
4.1 Vad som är gjort
Uppgiften vi har arbetat med var att skapa ett simulatorprogram som dels kan användas för att utveckla olika styrprogram och inlärningsmetoder och dels kan användas för att styra en riktig robot. Varje robot skulle kunnas köras från en separat dator i ett lokalt nätverk och världen simuleras på en server. Vi har lyckats på många punkter. Det som fattas är en mer avancerad kollisionshantering som hanterar rotation och att räkna ut studsarna mer noggrant. Vi har inte heller implementerat komunikationen med en RS232-port för direktkommunikationen med Kheperan. Anledningen till det är att vi inte hade tillgång till en riktig Khepera under projektets gång. Av samma anledning så har vi inte testat att simuleringen av roboten överrensstämmer med styrning av den riktiga roboten. Men med tanke på arbetets omfattning är vi väldigt nöjda med vår insats.
4.2 Framtiden
Vad som behöver göras är att implementera fler sensorer och effektorer. Utveckla ännu en robot för att se att programmet har den flexibilitet som krävdes av handledarna. Testa programmet mot riktiga sensorer och riktiga robotar för att bekräfta funktionaliteten och testa att simuleringen överensstämmer med verkligheten.
Vi behöver också implementera den klass som skall komunicera med en RS232-port. Detta verkar inte vara speciellt svårt men vi har avvaktat då vi inte har någon hårdvara att testa på.
Gränssnittet kan utökas med fler olika kartobjekt och möjlighet att skala om och konstruera nya kartobjekt innifrån simulatorprogrammet. Framför allt skulle det vara bra att ha ett konstruktionsset för robotar där man kan placera ut fördefinierade effektorer och sensorer på robotkroppen (läs polygonen). Dessa egenkonstruerade robotar kunde sedan styras med ett språk som definierades av deras sensorer och effektorer.
För en mer åtkomlig produkt kan man byta det lokala nätverket mellan simulatorserver och robotklienter till det globala Internet genom att presentera servern som en applet och göra det möjligt att hämta hem och skapa ett robotklient program genom något javascript. Denna utbyggnad skulle dock kräva en omarbeting av gränssnittet och förmodligen sätta begränsningar på robotarnas komplexitet och sålunda programmets funktionalitet.
5 Referenser
[1] Död Robot av Isaak Asimov, Legenda Pocket, ISBN 91-582-1220-5
[2] Markov Processer Artificial Minds av Stan Franklin MIT Press A Bradford Book, ISBN 0-262-06178-3
[3] Labratoire de Microinformatique, 2000-01-01, http://lamiwww.epfl.ch/ Khepera
[4] Robocup, 2000-01-20, http://www.robocup.org
[5] Robot Motion Planning av J.-C.Latombe och Kluwer, Academic Publishers, Boston, 1991
Appendix A – Ordlista
|
Applet |
Javaklass som möjliggör att ett program kan köras i en webläsare |
|
Effektor |
Samlingsnamn på en apparat som uför något med omgivningen t.ex. motor eller gripklo |
|
Khepera |
Namn på liten robot som marknadsförs a Labratoire de Microinformatique |
|
Klient |
Dator i ett nätverk som arbetar mot en server |
|
Passiv Referens |
Eng. Dead Reconing; att hitta från en punkt till en annan utan att mäta omvärden |
|
RS232 |
Standard för kommunikation över en 8-bitars seriell kabel |
|
Sensor |
Samlingsnamn för liten mätapparat som omvandlar någon aspekt av omgivningen till en mätbar kvantitet |
|
Server |
Värddator i ett nätverk. Servern förser klienter med tjänster |
|
Trådar |
Datorsammanhang; ett program som kan köra samtidigt som andra program. Ex: Om en robot styrs av ett program och man vill styra flera robotar kan varje robotprogram startas i en tråd. |
|
Webläsare |
Program som kan läsa och visa information från Internet. |
Appendix B – Kheperans Kommandon
Lista av tillgängliga kommandon till Kheperan. Beskrivningen ges på engelska och är ett utdrag till Kheperans manual.
#
indicates CR (carriage return) or LF (line feed). ¶ indicates CR and LF.)
A Configure
Format of the command: A, Kp, Ki, Kd#
Format of the response: a¶
Effect: Set the proportional (Kp), integral (Ki) and derivative (Kd) parameters of the speed controller. At the reset, these parameters are set to standard values: Kp to 3800, Ki to 800, Kd to 100.
B Read software version
Format of the command: B#
Format of the response: b, version_of_BIOS, version_of_protocol¶
Effect: Give the version of the software present in the EPROM of the robot.
C Set a position to be reached
Format of the command: C,pos_left,pos_right#
Format of the response: c¶
Effect: Indicate to the wheel position controller an absolute position to be reached. The motion control perform the movement using the three control phases of a trapezoidal speed shape: an acceleration, a constant speed and a deceleration period. These phases are performed according to the parameters selected for the trapezoidal speed controller (command J). The maximum distance that can be given by this command is (2**23)-2 pulses that correspond to 670m. The unit is the pulse that corresponds to 0.08mm. The movement is done immediately after the command is sent. In the case another command is under execution (speed or position control) the last command replaces the precedent one. Any replacement transition follows acceleration and maximal speed constraints.
D Set speed
Format of the command: D, speed_motor_left, speed_motor_right#
Format of the response: d¶
Effect: Set the speed of the two motors. The unit is the pulse/10 ms that corresponds to 8 millimetres per second. The maximum speed is 127 pulses/10ms that correspond to 1m/s.
E Read speed
Format of the command: E#
Format of the response: e, speed_motor_left, speed_motor_right¶
Effect: Read the instantaneous speed of the two motors. The unit is the pulse/10 ms that corresponds to 8 millimetres per second.
F Configure the position PID controller
Format of the command: F,Kp,Ki,Kd#
Format of the response: f¶
Effect: Set the proportional (Kp), the integral (Ki) and the derivative (Kd) parameters of the position regulator. At the reset, these parameters are set to standard values: Kp to 3000, Ki to 20, Kd to 4000.
G Set position to the position counter
Format of the command: G, position_motor_left, position_motor_right#
Format of the response: g¶
Effect: Set the 32 bit position counter of the two motors. The unit is the pulse, that corresponds to 0,08 mm.
H Read position
Format of the command: H#
Format of the response: h, position_motor_left, position_motor_right¶
Effect: Read the 32 bit position counter of the two motors. The unit is the pulse, that corresponds to 0,08 mm.
I Read A/D input
Format of the command: I, channel_number#
Format of the response: i, analog_value¶
Effect: Read the 10 bit value corresponding to the channel_number analog input. The value 1024 corresponds to an analog value of 4,09 Volts.
J Configure the speed profile controller
Format of the command: J, max_speed_left, acc_left, max_speed_right, acc_right#
Format of the response: j¶
Effect: Set the speed and the acceleration for the trapezoidal speed shape of the position controller. The max_speed parameter indicates the maximal speed reached during the displacement. The unit for the speed is the pulse/10ms that corresponds to 8 mm/s. The unit for the acceleration is the ((pulse/256)/10 ms)/10 ms, that correspond to 3,125 mm/s2. At the reset, these parameters are set to standard values: max_speed to 20, acc to 64.
K Read the status of the motion controller
Format of the command: K#
Format of the response: k, T_left, M_left, E_left, T_right, M_right, E_right¶
Read the status of the motion controller. The status is given by three numbers for every motor: T (target), M (mode) and E (error). T=0 means that the robot is still on movement. T=1 means that the robot is on the target position. M=0 means that the motor control is in the speed mode. M=1 means that the control is in position mode. M=2 means that the control is in PWM mode. E indicates controller position or speed error.
L Change LED state
Format of the command: L, LED_number, action_number#
Format of the response: l¶
Effect: Perform an action on one of the two LEDs of the robot. Possible actions are: 0: turn OFF, 1: turn ON, 2: change status. The LED number 0 is the lateral one, the LED number 1 is the frontal one.
N Read proximity sensors
Format of the command: N#
Format of the response: n,val_sens_left_90°,val_sens_left_45°,val_sens_left_10°,val_sens_right_10°,val_sens_right_45°,val_sens_right_90°,val_sens_back_right,val_sens_back_left¶
Effect: Read the 10 bit values of the 8 proximity sensors (section 2.1.6.2), from the front sensor situated at the left of the robot, turning clockwise to the back-left sensor.
O Read ambient light sensors
Format of the command: O#
Format of the response: o,val_sens_left_90°,val_sens_left_45°,val_sens_left_10°,val_sens_right_10°,val_sens_right_45°,val_sens_right_90°,val_sens_back_right,val_sens_back_left¶
Effect: Read the 10 bit values of the 8 light sensors (section 2.1.6.1), from the front left sensor turning clockwise to the back-left sensor.
P Set PWM (pulse with modulation)
Format of the command: P, pwm_motor_left, pwm_motor_right#
Format of the response: p¶
Effect: Set the desired PWM amplitude (see "Motors and motor control" on page 6 for more details) on the two motors. The minimum PWM ratio is 0 (0%). The maximal forward ratio (100%) correspond to a value of 255. The maximal backwards ratio (100%) correspond to a value of -255.
T Send a message to an extension turret
Format of the command: T, turret_ID, command#
Format of the response: t, response¶
Effect: Send a command and return the response of the intelligent extension turret with turret_ID. The list of turrets connected and their ID can be requested with the tool "net". The command parameter takes the same format as a standard command, including an identification capital letter followed, if necessary, by numerical parameters separated by a comma and terminated by a line feed. The response takes the same format, starting with the same letter but in lower case, followed, if necessary, by numerical parameters separated by a comma and terminated by a line feed. The command and response format are specific for every module.
R Read a byte on the extension bus
Format of the command: R, relative_address#
Format of the response: r, data¶
Effect: Read the data byte available at the relative_address (0...63) of the extension bus.
W Write a byte on the extension bus
Format of the command: W, data, relative_address#
Format of the response: w¶
Effect: Write the data byte at the relative_address (0...63) of the extension bus.
Appendix C – Klasser
Beskrivning av de klassobjekt som ingår i vårt simulatorprogram.
|
Namn |
Punkt |
Linje |
Poly |
|
Data |
double x,y |
double x1,y1,x2,y2 |
double xp[], yp[] int number, length double x1,y1,x2,y2,
direction |
|
Konstruktorer |
Punkt() Punkt(x,y) Punkt(punkt) |
Linje() Linje(x1,y1,x2,y2) Linje(linje) |
Poly(poly) Poly(x[],y[],number) Poly(x[],y[],number,dir) |
|
Metoder |
distance(punkt) distance(x,y) distance(poly) direction(punkt) direction(x,y) getPoint() translate(dx,dy) translate(punkt) translatePolar(ang, dist) toString() |
translate(dx,dy) getCenter() rotate(ang) length() isVertical() isHorizontal() intersects(linje) toString() draw(graphics) direction() minimumDistance(punkt) minimumDistance(x,y) |
translate(dx,dy) translate(punkt) getPolygon() getCenter() getPunkt(i) getBounds() updateBounds() intersects(poly) intersectsLinje(poly) overlaps(poly) rotate(ang) setDirection(dir) getDirection() getLinje(i) |
|
Namn |
Material |
Rorelse |
KartObjekt |
|
Data |
double weight, friction double brus Color color boolean transparent |
KartObjekt sak double hastighet, rotation boolean moveable |
Poly pol, Material mat,
Rorelse mov KartObjekt connectedTo Int thispoint, topoint Vector sensors, effectors |
|
Konstruktorer |
Material() Material(material) Material(color) Material(transparent) Material(color, frict, wgt) |
Rorelse(sak, Rorelse) Rorelse(sak) Rorelse(sak, hast, rotat) |
KartObjekt(poly p) KartObjekt() |
|
Metoder |
isTransparent() getFriction() getWeight() getNoice() getColor() toString() setTransparency(trans) setFriction(frict) setWeight(weig) setNoice(brus) setColor(Color c) |
setSpeed(hastighet) getSpeed() setRotation(rotation) getRotation() setDirection(dir) getDirection() update() toString() |
setColor(col), getColor() setPoly(poly), getPoly() setConnection(denna, ko,
där) clearConnection() getConnected(),
connectedAt() connectedTo(), isConnected() getEffectors(),
getEffector(i) getSensors() addEffektor(effektor) setEffector(i,values[]) overlaps(kartobj) getReading(i, arena) setMaterial(material),
getMaterial() setMovement(rorelse)
getMovement() setDirection(dir),
getDirection() turn(), update() setSpeed(fart), getSpeed() setRotation(dang),
getRotation() setMoveable(boolean),
isMoveable() setWeight(w), getWeight() setFriction(f),
getFriction() setTransparency(boolean) isTransparent() setNoice(n), getNoice() draw(graphics),
erase(graphics, bkcol) translate(dx,dy),
getKartObjekt() getColorName(), copy() |
|
Namn |
Effektor (super) |
Lampa |
TvaHjulsMotor |
|
Data |
String namn, text int fästpunkt, antal KartObjekt sak double[] value, wanted |
extends Effektor int size Color base, color |
extends Effektor final double maxspeed, acc double hjulavstånd, d0,d1 |
|
Konstruktorer |
Effektor(sak, fästpunkt) Effektor(sak, fästpunkt,
namn) Effektor(sak, fp, namn,
antal) |
Lampa(Kartobjekt, fp,
color) |
TvaHjulsMotor(kartobjekt,
fp) |
|
Metoder |
setNamn(namn) getNamn() set(value) setDirect(index, val) set(text) getValues() getText() abstract update(ms) abstract draw(Graphics) abstract effekt() abstract fel() |
update(ms) effekt() fel() draw(Graphics) |
setHjulAvstånd(dist) update(ms) effekt() fel() draw(Graphics) |
|
Namn |
Sensor (super) |
DistanceSensor |
FotoSensor |
|
Data |
private String Namn private int strålar,
fästpunkt private double djup, bredd,
riktning, diroffset, ambience, brus Poly sak KartObjekt kartobjekt double delay double[] value |
extends Sensor |
extends Sensor |
|
Konstruktorer |
Sensor() Sensor(sak, fästpunkt) |
DistanceSensor(sak, fp,
dir) |
FotoSensor(sak, fp, dir) |
|
Metoder |
adjustDirection(ang) setPoly(sak) getPoly() setKartObjekt(kartobjekt) getKartObjekt() setDelay(sec) getDelay() setName(Namn) getName() setFields(antal) getFields() setDepth(djup) getDepth() setWidth(bredd) getWidth() setDirection() getDirection() setOrigin(fästpunkt) getOrigin() setAmbience(ambience) getAmbience() setNoice(brus) getNoice() getPosition() getReading() getField(nr) getNewReading() abstract makeReading(items) |
makeReading(items) |
makeReading(items) |
|
Namn |
CollisionManager |
Robot |
Khepera |
|
Data |
|
extends KartObjekt private String[] types private String name, type private int size private arena |
double scale int points double[] xp, yp |
|
Konstruktorer |
CollisionManager() |
Robot() Robot (name, type, arena) |
Khepera() |
|
Metoder |
adjust(kartobjekt1,
kartobjekt2) |
supported(type) getName() getType() getSpecs() react(recived) updateRobot() eraseSensors(Graphics) drawSensors(Graphics) |
getShape() initSensors(poly) initEffektors(robot) protocol(recived, robot) |
|
Namn |
Lysdiod |
GPS |
Kompass |
|
Data |
extends Effektor |
extends Sensor |
extends Sensor |
|
Konstruktorer |
Lysdiod(sak, fp, col) |
GPS(sak, fp, dir) |
Kompass(sak, fp, dir) |
|
Metoder |
update(ms) effekt() fel() draw(Graphics) |
makeReading(items) |
makeReading(items) |
|
Namn |
Kartograf |
NärhetsSensor |
|
|
Data |
extends Effektor |
extends Sensor |
|
|
Konstruktorer |
Kartograf(sak, fp, col) |
NärhetsSensor(sak, fp, dir) |
|
|
Metoder |
update(ms) effekt() fel() draw(Graphics) |
makeReading(items) |
|
Appendix D - Användarmanual
Den här robotsimulatorn har vuxit fram ur behovet att ge er en möjlighet att simulera styrprogram och inlärningsalgoritmer för olika robotar utan att ha tillgång till en riktig robot. Fördelen med att använda denna simulator är att när man har skapat ett program som fungerar i simulatorn är det tänkt att det skall fungera direkt mot roboten genom att ansluta roboten antingen genom en radiolänk eller genom en RS-232 port med kabelanslutning till roboten.
Simulatorn är skriven i Java och det rekommenderas att ni gör ert styrprogram i java, även om det inte är helt nödvändigt. Om ni gör det i något annat språk så får ni även ta hand om kommunikationen över det lokala nätverket.
Robotsimulatorn är ett server-klient program där servern visar världen och robotarna styrs av klienterna. Varje robot har sin egen klient. Den enda roboten som är implementerad i dagsläget är modellen Khepera som är tänkt att användas vid en fortsättningskurs efter tillämpad artificell intelligens, men det är inte så svårt att beskriva en ny robot, se Hur man gör en ny robot.
 När man startar simulatorn, och nu menar vi servern, så får man upp ett
grafiskt gränssnitt med fem delar. Det görs genom att skriva java RoboWorld vid promten.
När man startar simulatorn, och nu menar vi servern, så får man upp ett
grafiskt gränssnitt med fem delar. Det görs genom att skriva java RoboWorld vid promten.
Alla kartobjekt och robotar kan flyttas omkring med musen och man kan markera flera objekt samtidigt genom att hålla shift-tangenten nedtryckt. Man kan klippa, kopiera och klistra kartobjekt eller grupper av kartobjekt till andra ställen på arenan genom att använda alternativen under menyposten Edit.
När man skall göra en simulering så skapar man en bana eller laddar in en tidigare skapad bana och startar anslutningen i menyn Simulation-Connections. I rutan för programinformation står nu Connections enabled vilket tillåter robotar att ansluta sig.
För att starta en robot så starta en robotklient genom att skriva java RoboClient, eller namnet på er egen robotklient, i ett terminalfönster. Ni får nu tre frågor. Var servern är, vilken typ av robot du vill simulera och vad du vill kalla din robot. Svaren på frågorna kan vara orff-2, khepera och Roger. Nu dyker roboten upp i övre vänstra hörnet på serverns arena och du kan flytta roboten vart du vill med musen.
Programmet betstår av ett antal klasser som bildar ett kartobjekt. En robot är ett kartobjekt likaså en bit vägg. Ett kartobjekt har alla de egenskaper som man förknippar med ett rörligt objekt på skärmen. Den har en riktning, en hastighet, ett material och den beskrivs av en polygon. Materialet beskriver färgen, vikten och friktionen mot underlaget samt om den är transparent.
Alla koordinater i programmet beskrivs av typen double så det är möjligt att flytta ett kartobjekt ett avstånd som inte är ett heltal.
En robot är ett kartobjekt som har sensorer, effektorer och ett styrprogram. Sensorer känner av sin omgivning och effektorer påverkar sin omgivning eller objektet det sitter på. För att en robot skall lära sig något så skall man ändra i klassen Brain på klientsidan. I klassen Brain skall man skapa en metod react() som automatiskt anropas regelbundet. Om man vill så kan man skicka förfrågningar till servern med metoden action(String) och om allt går som det skall får man en retursträng med svaret.
Hur man
skapar en effektor
En effektor är ett objekt som påverkar omgivningen eller det kartobjekt det sitter på. De effektorer som är skapade nu är tvåhjulsmotorn som sitter på en Khepera och lampor. En effektor beskrivs av ett antal datafält som alla innehåller ett värde av typen double. Det finns fyra metoder som man skall beskriva för att definiera en effektor. Man kan komma åt alla kartobjektets metoder ifrån referensen till det kartobjekt som effektorn sitter på och om det är en robot så kan man även komma åt alla andra objekt i världen genom dess referens till arenan. Här nedan beskrivs metoderna man skall definiera.
![Text Box: Metoder som ärvs från superklassen effektor
Datafält
String namn="Effektor"; String text;
int fästpunkt;KartObjekt sak;
int antal=1; // antal effektorvärden;
double[] value=new double[antal];
double[] wanted=new double[antal];
Konstruktorer
public Effektor(KartObjekt p, int fp)
public Effektor(KartObjekt p, int fp, String)
public Effektor(KartObjekt p, int fp, String n, int ant)
Metoder
public void setNamn(String n)
public String getNamn()
public void set(double[] val) // ger effektorn önskade värden
public void set(String s) // ger effektorn en sträng
// set utför effekt() och om det blir fel (false)
// så anropas metoden fel().
public double[] getValues() // hämtar effektorvärden
public String getText() // hämtar en sträng I effektorn
Abstrakta metoder
public abstract void update(double ms);// Tid mellan update() i ms
public abstract void draw(Graphics g);
public abstract boolean effekt();
public abstract void fel();
}](./Examensarbete%20Tim%20Portnoff_files/image033.gif)
Man har tillgång till alla de metoder man ärver från
effektorsuperklassen. Den klassens metoder står beskrivna här nedan.
Utöver dessa metoder så har man metoderna för det kartobjekt som effektorn sitter på. Dessa kan man komma åt från datafältet sak. För en beskrivning av kartobjekt se nedan.
Ett exempel på effektor är en lampa. Här nedan följer en beskrivning hur den är implementerad.
![Text Box: Lampans implementation
import java.awt.Color; import java.awt.Graphics;
public class Lampa extends Effektor{
Datafält
int size=3;
Color base=new Color(255,255,245);
Color color=new Color(255,255,245);
Konstruktorer
Lampa (KartObjekt kartobjekt, int fästpunkt, Color color){
super(kartobjekt, fästpunkt,"Lampa",1); this.base=color;}
Lampa (KartObjekt kartobjekt, int fästpunkt){
super(kartobjekt,fästpunkt,"Lampa",1);}
Metoder
public void update(double ms) {
if (wanted[0]>=1)value[0]=1; else if (wanted[0]<=0)value[0]=0;
else value[0]=wanted[0]; effekt(); }
public boolean effekt() {
color=new Color((int)(base.getRed()*value[0]),(int)(base.getGreen()* value[0]),(int)(base.getBlue()*value[0]));
return true; }
public void fel(){}
public void draw(Graphics g) {
g.setColor(color);
Punkt fp=sak.getPoly().getPunkt(fästpunkt);
g.fillOval((int)(fp.x-size),(int)(fp.y-size),2*size,2*size); }
}](./Examensarbete%20Tim%20Portnoff_files/image034.gif)
Superklassen Sensor import java.util.Vector; public
abstract class Sensor{ Datafält private
String Namn; private
int strålar=1; // antal strålar, djup långa, fördelade i bredd private
double djup=1000; private double bredd=0.1; // radianer private
double riktning=0; private double diroffset=0; private
int fästpunkt=0; // var på Poly sitter den private
double ambience=0.02; // bakgrundsstrålning private
double brus=0.02; // brus, variation kring sensorvärdet private
Poly sak=null; // den sak som sensorn är fäst på KartObjekt
kartobjekt=null; double[] value; //
mätvärden double delay=0.05; // Sensorns hastighet I ms Konstruktorer public
Sensor(){} public
Sensor(Poly p, int fp){sak=p;fästpunkt=fp;setDirection();} Metoder public
void adjustDirection(double a){ diroffset=a; if
(sak!=null) setDirection(); } public
void setPoly(Poly p) {sak=p;} public
Poly getPoly() {return sak;} public
void setKartObjekt(KartObjekt ko){kartobjekt=ko;} public
Poly getKartObjekt(){return kartobjekt;} public
void setDelay(double t) {delay=t;} public
double getDelay() {return delay;} public
void setName(String n) {Namn=n;} public
String getName() {return Namn;} public
void setFields(int ant) {strålar=ant;value=new double[strålar];} public int
getFields() {return strålar;} public
void setDepth(double d) {djup=d;} public
double getDepth(){return djup;} public
void setWidth(double b) {bredd=b;} public
double getWidth(){return bredd;} public
void setDirection(){riktning=sak.getDirection()+diroffset;} public
double getDirection(){setDirection();return riktning;} public
void setOrigin(int fp){fästpunkt=fp;} public int
getOrigin(){return fästpunkt;} public
void setAmbience(double a){ambience=a;} public
double getAmbience() {return ambience;} public
void setNoice(double b) {brus=b;} public
double getNoice(){return (Math.random()-0.5)*brus;} public
Punkt getPosition() {return new Punkt(sak.getPunkt(fästpunkt));} public
double[] getReading(){return value;} public Poly getField(int nr){ … kod … return new Poly(x,y,3);} public
double[] getNewReading(Vector ){ setDirection();
makeReading(k); return value;} public abstract void makeReading(Vector items); }
En sensor är någonting som tolkar sin omgivning
till ett antal värden. En sensor kan placeras på ett kartobjekt men inte förrän
kartobjektet är en robot kan värdena läsas och användas på något sätt[9].
De sensorer som finns just nu är avståndssensorn och ljussensorn. Båda
klasserna ärver från den abstrakta superklassen Sensor. Här nedan följer en kort beskrivning av superklassen
Sensor.
1.1.1.1
Abstrakt metod
 Implementation av avståndssensorn
Implementation av avståndssensorn
Hur gör man då för att skapa en ny typ av sensor ifrån denna superklass? Jo man gör en ny klass som ärver från Sensor och som implementerar makeReading(Vector items) metoden. Här nedan följer ett programexempel på hur avståndssensorn är gjord.
Implementation av avståndssensor import java.util.Vector; import java.lang.Math; public
class DistanceSensor extends Sensor{ Konstruktor public
DistanceSensor(Poly sak, int fp, double r){ super(sak,fp);
super.setName("Distance Sensor"); setFields(1); setWidth(0.3); setDepth(250); adjustDirection(r);
} Metod public
void makeReading(Vector items){ int
number=items.size(); KartObjekt item; Poly
field; double dist, best; double d=getDepth(); for
(int j=0;j<getFields();j++) { field=getField(j);
dist=d; best=d; for
(int i=0;i<number;i++) { item=(KartObjekt)items.elementAt(i); if(this.getPoly()!=item.getPoly())
{ if
(field.overlaps(item.getPoly())) dist=
field.getPunkt(0).distance(item.getPoly()); if
(best>dist) best=dist; } } value[j]=Math.max((d-best)/d+getNoice(),
getAmbience()+ getNoice()); } } }
När man gör en ny robot så gör man en klass som har ett par metoder som beskriver dess språk. Språket är ett antal strängar som antingen ger värden till robotens effektorer eller hämtar värden från dess sensorer. Det är lättast att ge ett exempel på hur en robot kan se ut.