

Robotsimulering
Ett
samarbete mellan Tim portnoff och Henrik Lernmark
Robotinlärning
En robots nuvarande
problemställning är för tillfället
· Var är jag, var ska jag och vad ser jag?
· Hur skall jag kombinera detta till något vettigt?
Robotinlärning är en adaptiv process som kombinerar indata
från sensorer till utdata till effektorer och som förbättrar robotens
prestation allteftersom tiden går
Varför Robotsimulering?
|
·
Kostnadseffektivt |
När väl simulatorn är byggd kan många använda den |
|
·
Tillåter misstag |
Inga dyra robotdelar kan gå sönder |
|
· Ger en första förståelse |
Simulatorn utreder problematiken kring
robotstyrning och inlärning |
|
· Snabbare inlärning |
Inlärningsalgoritmer kan lära sig i simulerad tid |
Vår Simulator är
· Objektorienterad
· Skriven i java
· Arbetar i realtid
· Skalbar över nätverket
· Flexibel (Inlärningsalgoritmen kopplas till roboten)
· Utbyggbar med nya komponenter
Simulatorns delar och kommunikation
Grafiskt Gränssnitt

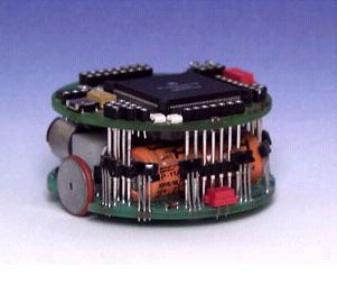
Roboten Khepera
·
Flera kommunikationsalternativ ·
Relativt
Billig ·
Bra
utbyggnadsmöjligheter ·
Liten ·
68030 processor
Konstruerad
av Labratoire de Microinformatique
Kommunikation med Kheperan
Styrprogrammet kommunicerar med den inbyggda
kommandotolken i Kheperan
Sensorer
Sensorer mäter någon aspekt av omgivningen och
omvandlar dessa till ett eller flera reella tal
|
· Fotosensor |
Mäter ljus från lampor |
|
· Avståndssensor |
Mäter avstånd till objekt |
|
· Närhetssensor |
Mäter reflekterat ljus från närbelägna objekt |
|
· Kompass |
Bedömer riktningen på den robot den sitter på |
|
· GPS |
Bedömer positionen av roboten den sitter på |
|
· Kartograf |
Ger en bild av hur omgivningen ser ut |
Effektorer
Effektorer påverkar omgivningen på något sätt
|
· Tvåhjulsmotor |
Ger roboten den sitter på en hastighet och en riktning med programmerbar acceleration och maxhastighet |
|
· Lampa |
Genererar ljus |
|
· Lysdiod |
Genererar lite mindre ljus |
Exempel på en sensor och en effektor

Fotosensor mäter ljus från lampor i omgivningen enligt:
Tvåhjulsmotorn påverkar robotens hastighet och riktning
enligt:
Med en maximal
hastighetsändring mellan två updateringar som avgörs av accelerationen
Kartobjekt
Kartobjekt är de grundläggande byggklossarna för att
skapa en bana i robotsimulatorn.
Ett kartobjekt kan ha: ·
Ett annat kartobjekt kopplat till
sig ·
En eller flera effektorer ·
En eller flera sensorer
Ett kartobjekt har:
· ett material
· en rörelse
· en polygon
Exempel på kartobjekt är lampor, bollar och väggbitar
Aggregationsmodell från klassen robot
Brister i simulatorn
· Simulatorn fungerar bra men är lite långsam när det finns många objekt på skärmen
· Kollisonshantering är inte komplett och hanterar ej rotationsändringar
· Många sensorvärden är uträknade från förenklade algoritmer
· Simulatorn kan bara köra i realtid
· Man kan inte konstruera nya robotar utan att kunna java
· Vissa av Kheperans kommandon är inte implementerade
· Kommunikationen över RS-232 med den riktiga Kheperan är inte gjord än
Positivt med Simulatorn
· Programmet har ett grafiskt gränssnitt som gör det lätt för användaren att testa en robot
· Det är lätt att skapa ett nytt styrprogram (om man kan Java)
· Det är möjligt att definiera en ny robot genom att bara skapa ett par nya klasser.
· Programmet kan lätt utökas i funktionalitet genom att definiera nya sensorer eller effektorer
· Nybörjare kan koppla på extra sensorer som underlättar styrning och inlärning (ex. GPS och Kompass)
· Skalbarhet genom att utnyttja flera datorer möjliggör större projekt

Tack!